四相步进电机驱动电路及驱动程序设计 我们用一个单片机控制多个步进电机指挥跳舞机器人的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作,荣获一等奖
电路采用74373 锁存,74LS244 和 ULN2003 作电压和电流驱动,单片机(Atc52)作脉冲序列信号发生器
程序设计基于中断服务和总线分时利用方式,实时更新各个电机的速度、方向
整个舞蹈由运动数据所决定的一截截动作无缝连接而成
本文主要介绍一下这个机器人的四相五线制步进电机驱动电路及程序设计
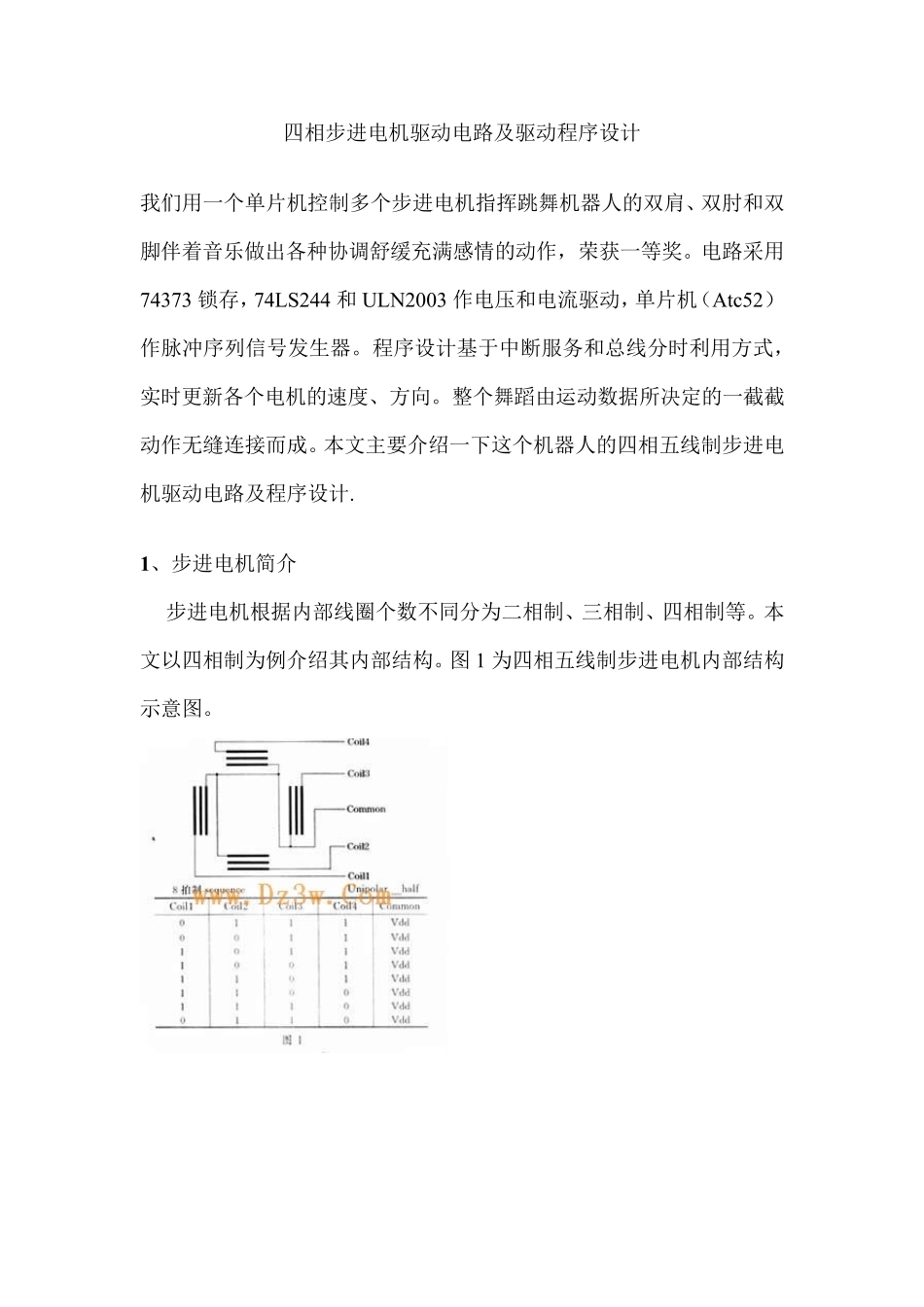
1 、步进电机简介 步进电机根据内部线圈个数不同分为二相制、三相制、四相制等
本文以四相制为例介绍其内部结构
图 1 为四相五线制步进电机内部结构示意图
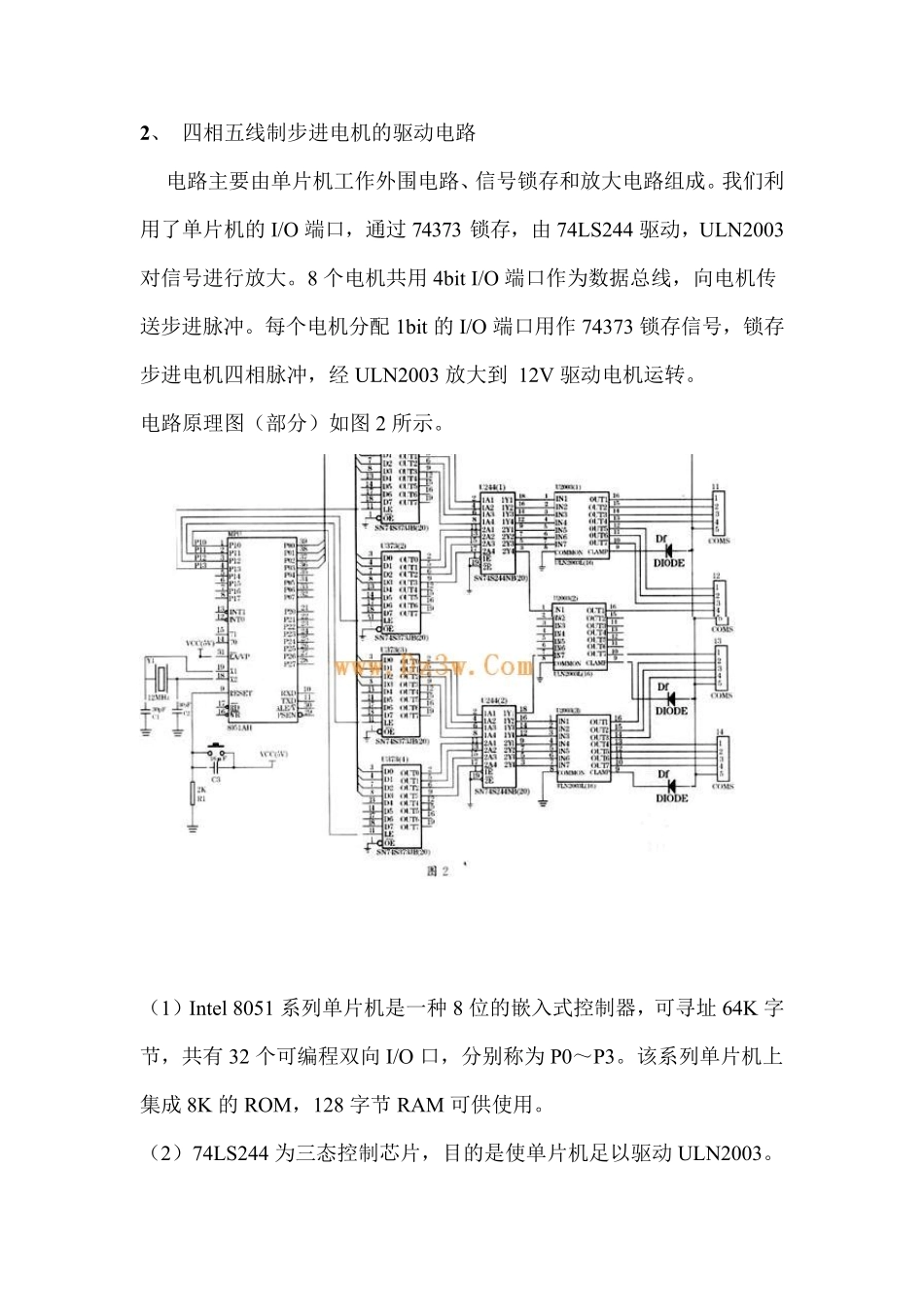
2 、 四相五线制步进电机的驱动电路 电路主要由单片机工作外围电路、信号锁存和放大电路组成
我们利用了单片机的 I/O 端口,通过 74373 锁存,由 74LS244 驱动,ULN2003对信号进行放大
8 个电机共用 4bit I/O 端口作为数据总线,向电机传送步进脉冲
每个电机分配 1bit的 I/O 端口用作 74373 锁存信号,锁存步进电机四相脉冲,经 ULN2003 放大到 12V 驱动电机运转
电路原理图(部分)如图 2 所示
(1)Intel 8051 系列单片机是一种 8 位的嵌入式控制器,可寻址 64K 字节,共有 32 个可编程双向 I/O 口,分别称为 P0~P3
该系列单片机上集成 8K 的 ROM,128 字节 RAM 可供使用
(2)74LS244 为三态控制芯片,目的是使单片机足以驱动 ULN2003
ULN2003 是常用的达林顿管阵列,工作电压是12V,可以提供足够的电流以驱动步进电机
关于这些芯片的详细介绍可参见它们各自的数据手册
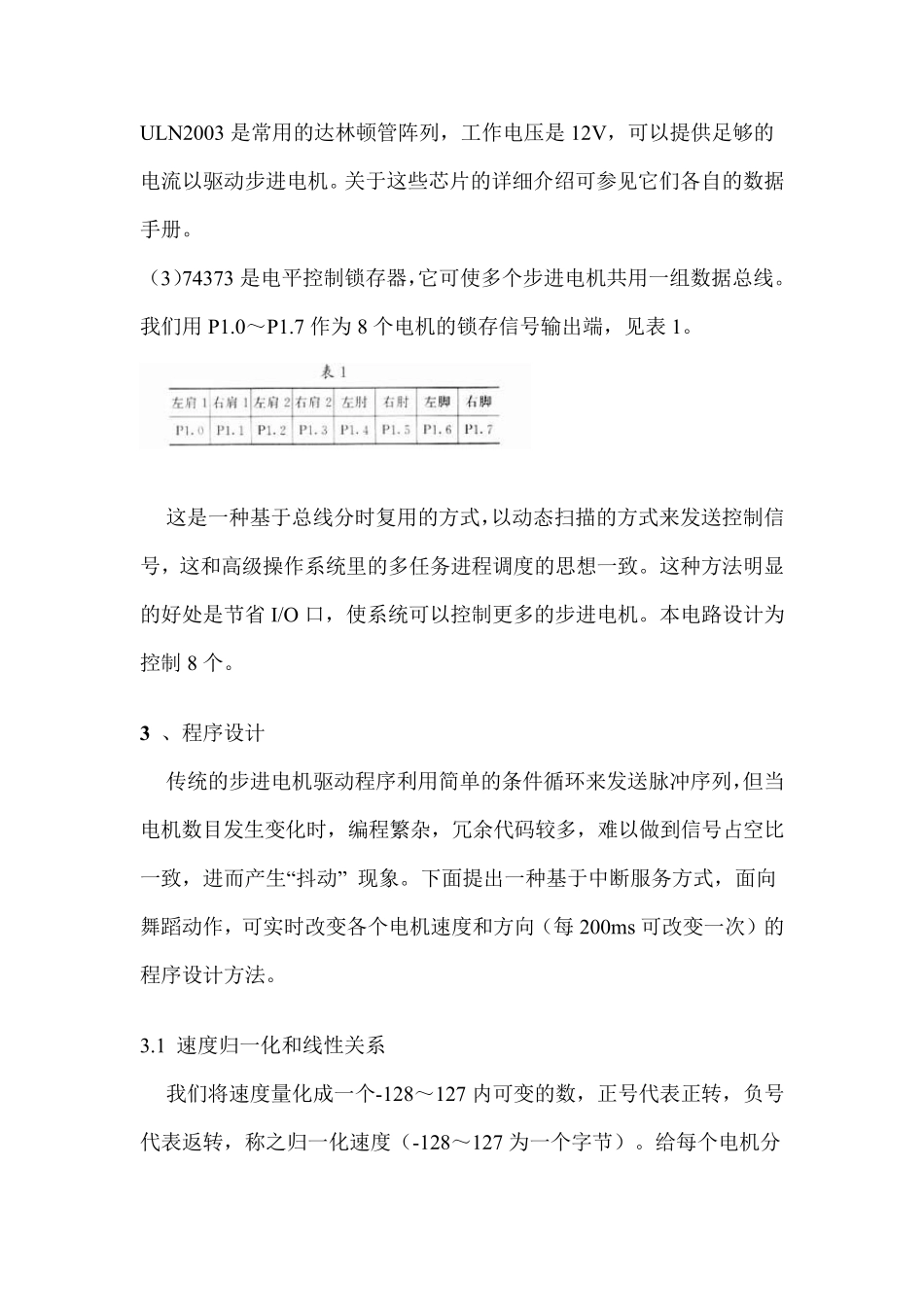
(3)74373 是电平控制锁存器,它可使多个步进电机共用一组数据总线