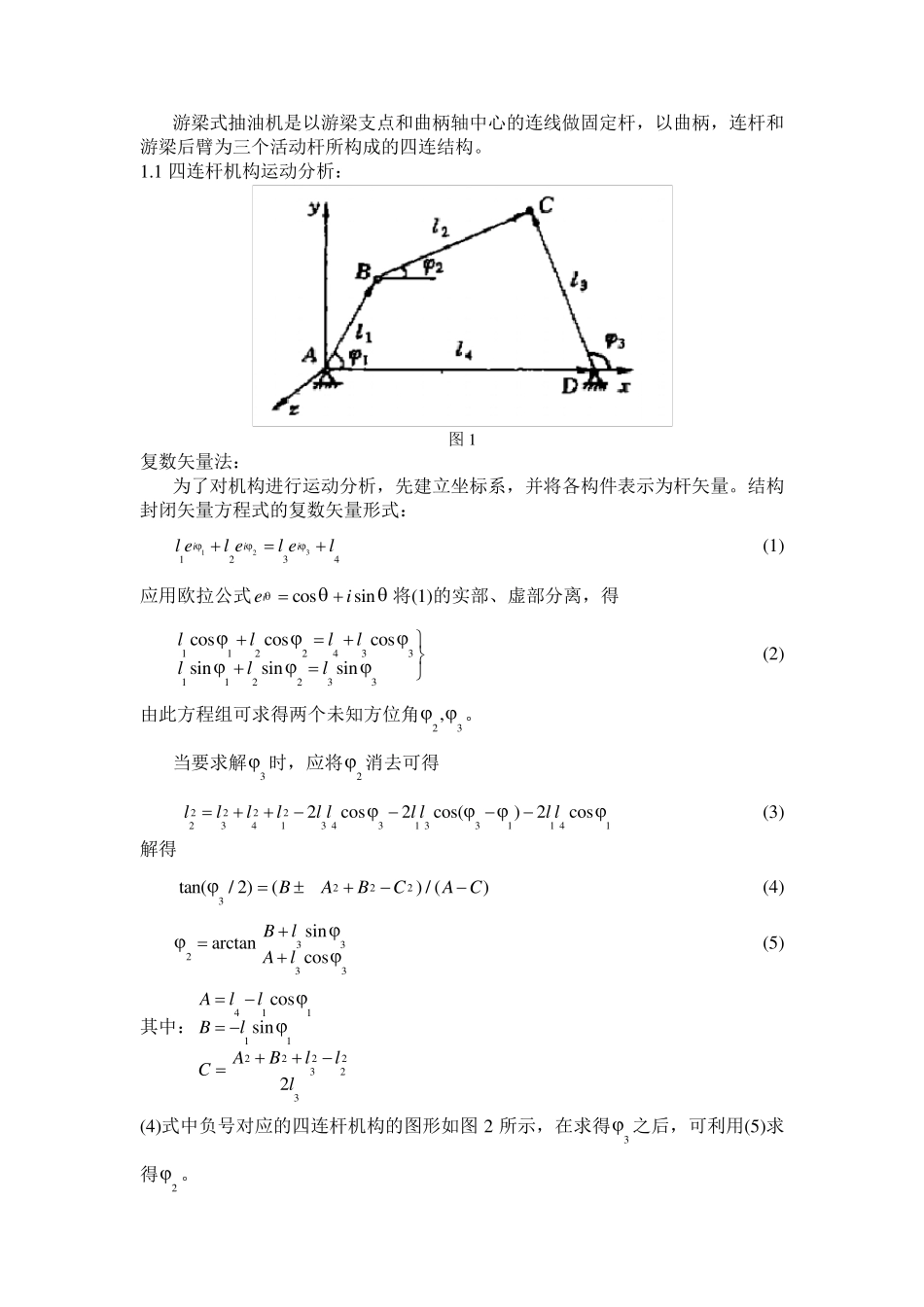
游梁式抽油机是以游梁支点和曲柄轴中心的连线做固定杆,以曲柄,连杆和游梁后臂为三个活动杆所构成的四连结构
1 四连杆机构运动分析: 图1 复数矢量法: 为了对机构进行运动分析,先建立坐标系,并将各构件表示为杆矢量
结构封闭矢量方程式的复数矢量形式: 3121234iiilel elel (1) 应用欧拉公式cossiniei将(1)的实部、虚部分离,得 1122433112233coscoscossinsinsinlllllll (2) 由此方程组可求得两个未知方位角23,
当要求解3 时,应将2 消去可得 222223413 431 3311 412cos2cos()2cosllllllllll (3) 解得 2223tan(/ 2)() / ()BABCAC (4) 33233sinarctancosBlAl (5) 其中:411112222323cossin2AllBlABllCl (4)式中负号对应的四连杆机构的图形如图2 所示,在求得3 之后,可利用(5)求得2
图2 由于初始状态1 有个初始角度,定义为01 ,因此,我们可以得到关于011t, 是曲柄的角速度
而通过图形3 分析,我们得到OA 的角度0312
因此悬点E 的位移公式为||sOA,速度 ||dsdvOAdtdt,加速度2222||dvd sdaOAdtdtdt
图3 已知附录4 给出四连杆各段尺寸,前臂AO=4315mm,后臂BO=2495mm,连杆BD=3675mm ,曲柄半径O’D=R=950mm ,根据已知条件我们推出''|||| ||||OOO DOBBD违背了抽油系统的