一、小型四旋翼无人机总体架构 典型的小型四旋翼无人机,一般由机械部分(机架),动力部分(包括电机、电子调速器、电调连接板、桨叶、电池),电子部分(包括飞控板、通信模块、遥控器接收机、PPM 编码板)组成
(一)机械部分 机架 考虑到编队飞行对实验室空间的要求,希望机架能够尽量的小
根据与蔡国伟老师对电机与桨叶(后文提到)的搭配进行讨论后,决定将机架的大小设定为轴距 255mm,边距 180mm(由 6 寸桨的大小决定)
1,底板 2,中间机架板 3,顶板 整个机体由底板、中间机架板、顶板连接而成(通过尼龙螺柱和螺丝);底板安置电池、xbee 模块、遥控器接收机、电调连接板,中间机架板安置 4 个电调、pixhawk 飞控板,顶板用于安置定位系统标记点(同时起到保护、隐藏 pixhawk飞控板及走线的作用);为便于安装,所有开孔、镂空均根据拟选器件匹配设计;拟采用碳 2mm 厚 3K 纤维板加工
另设计四个保护罩如下(可用于避免桨叶受损或伤人): 4,保护罩 (二)动力部分 (1 ) 电机 一般而言,小型四旋翼无人机(轴距250m m 左右)选用KV2000 左右(配5-6 寸桨)的电机
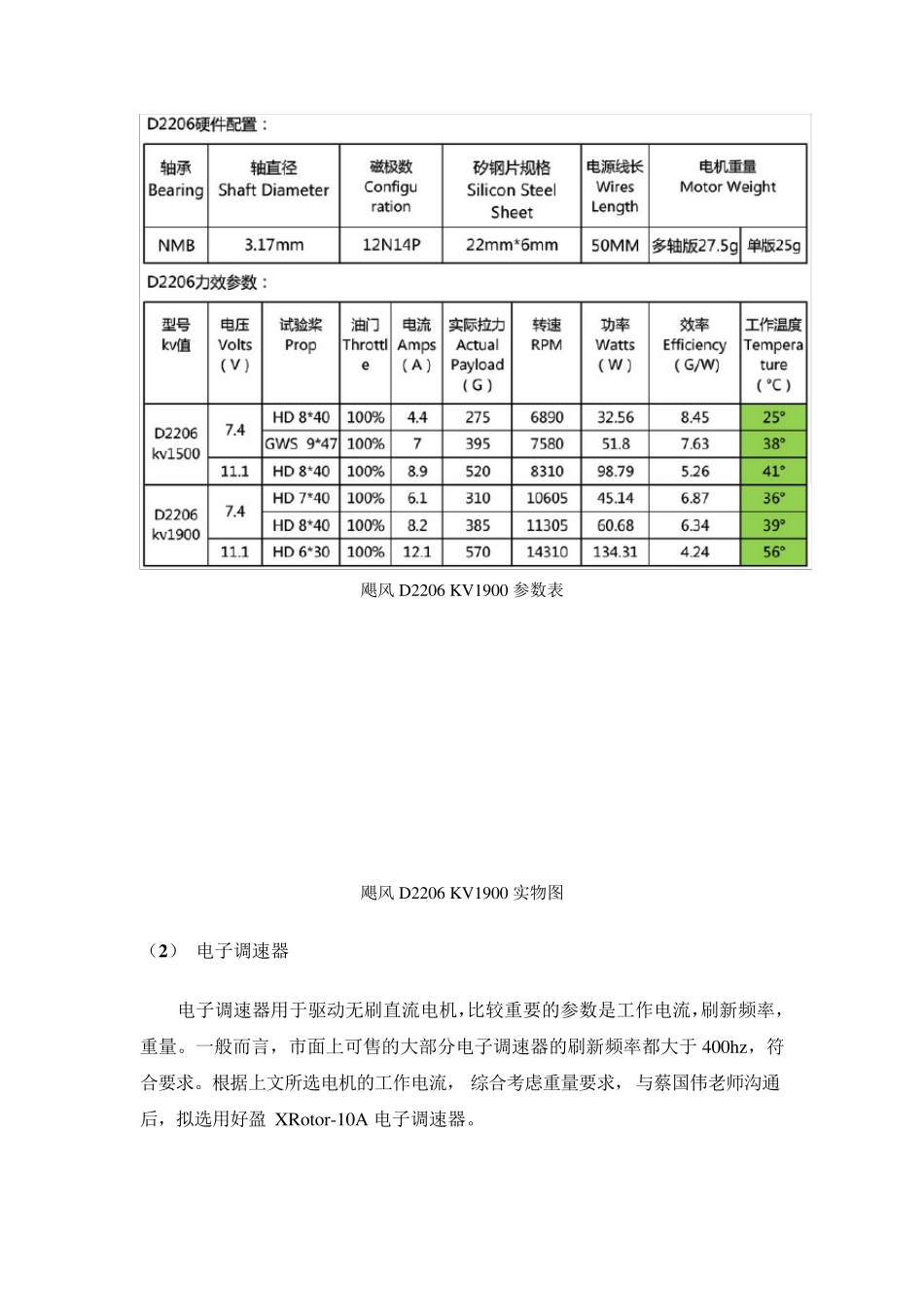
经过对比讨论后,拟选用飓风 D2206 KV1900 无刷直流电机(配6 寸桨)
之所以选用这款电机是因为这款电机能够提供较大的拉力,同时该电机的工作电流处在一个比较小的区间,单个电机重量仅为 27
飓风D2206 KV1900 参数表 飓风D2206 KV1900 实物图 (2 ) 电子调速器 电子调速器用于驱动无刷直流电机,比较重要的参数是工作电流,刷新频率,重量
一般而言,市面上可售的大部分电子调速器的刷新频率都大于400hz ,符合要求
根据上文所选电机的工作电流,综合考虑重量要求,与蔡国伟老师沟通后,拟选用好盈 XRotor-10A 电子调速器
好盈XRotor 系