1 延锋座椅OTC 机器人焊接系统操作说明 2 一、操作步骤 1、 上工准备: a、 上电;(顺序:变压器、焊接电源、机器人控制箱、系统主控箱) b、 压缩气开启; c、 检查焊丝、混合气是否充足,并确认气体流量; d、 检查焊枪部位是否正常(导电嘴、喷嘴); e、 检查机器人操作盘、示教器、系统主操作盒、副操作盒“紧急停止”打开,然后副操作盒处“运转准备”启动,打开外部轴伺服及读取外部轴位置数据 f、 检查夹具是否正常,并在水平位置,检查工件设定是否正确; g、 按“机器人启动”第一次启动机器人伺服,成功后指示灯闪动,按第二次启动机器人自动模式,成功后指示灯亮,并确认其在起点在安全位置(区域干涉); h、 三色灯只“绿”灯亮,系统准备就绪; i、 工件准备,进入工作状态
2、 下班准备: a、 机器人、夹具回到起点位置; b、 断电;(顺序:系统主控箱、机器人控制箱、焊接电源、变压器) c、 压缩气关闭,混合气关闭; d、 现场飞溅清理
3、 运转条件: a、 系统运转准备好,自动状态,触摸屏显示自动焊接画面; b、 机器人自动模式,伺服启动且在安全位置; c、 无报警信号(机器人报警,外部轴电机报警) d、 三色灯只绿灯亮,自动焊接准备好 e、 三色灯红灯(报警或紧急停止),绿灯亮(准备好),绿灯闪(系统运转中),黄灯亮(待机状态,机器人未准备好),黄灯闪(机器人停止中); f、 两主操作盒分别对应两个工位的启动、预约、再启动、预约指示及预约解除,运转中如有停止发生,预约启动会自动解除
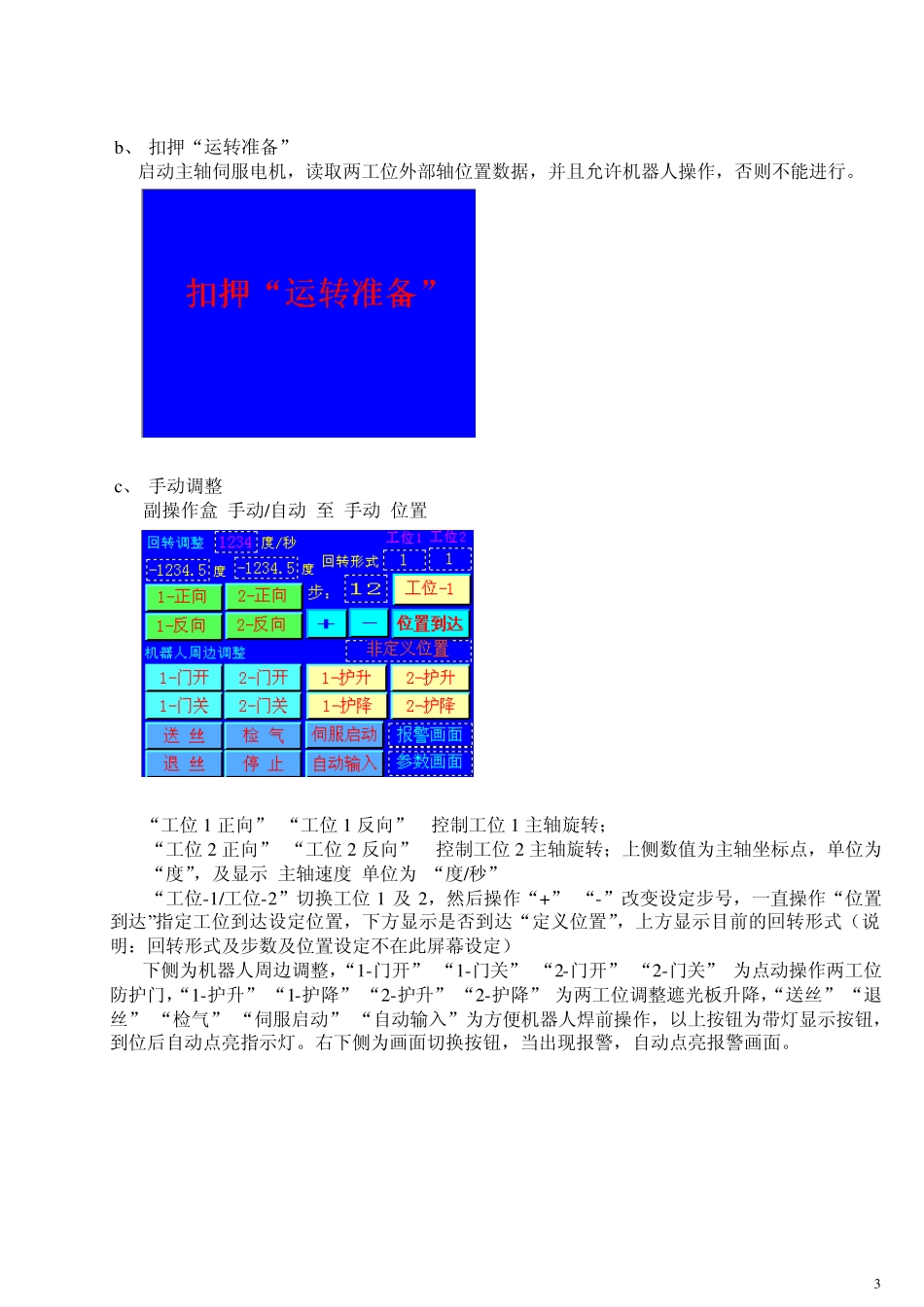
所有停止按钮功能相同 4、 触摸屏操作说明 a、 系统非常停止中 检查机器人操作盘、示教器、系统主操作盒、副操作盒“紧急停止”是否可靠打开后,扣押副操作盒上“运转准备”按钮 3 b、 扣押“运转准备” 启动主轴伺服电机,读取两工位外部轴位置数据,并且允许机器人操作,否则不能进行