1 第4 章 常 用 机 构 4
1 平 面 连 杆 机 构 4
1 平 面 连 杆 机 构 的 组 成 我 们 将 机 构 中 所 有 构 件 都 在 一 平 面 或 相 互 平 行 的平 面 内 运 动 的 机 构 称 为 平 面 机 构
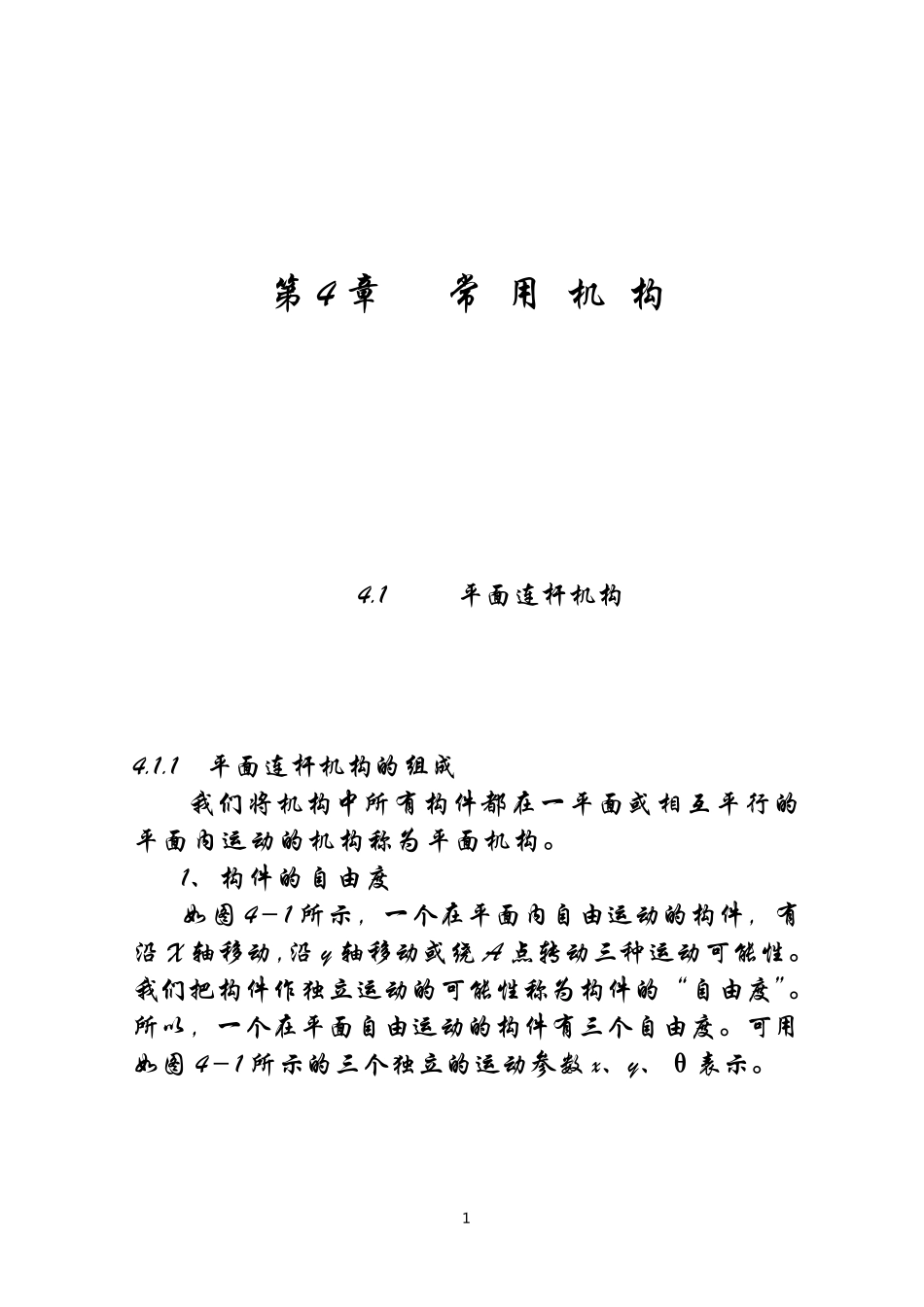
1、 构 件 的 自 由 度 如 图4- 1 所 示 , 一 个 在 平 面 内 自 由 运 动 的 构 件 , 有沿X 轴 移 动 ,沿y 轴 移 动 或 绕A 点 转 动 三 种 运 动 可 能 性
我 们 把 构 件 作 独 立 运 动 的 可 能 性 称 为 构 件 的 “ 自 由 度 ”
所 以 , 一 个 在 平 面 自 由 运 动 的 构 件 有 三 个 自 由 度
可 用如 图4- 1 所 示 的 三 个 独 立 的 运 动 参 数x、 y、 θ 表 示
2 2、 运 动 副 和 约 束 平 面 机 构 中 每 个 构 件 都 不 是 自 由 构 件 , 而 是 以 一 定的 方 式 与 其 他 构 件 组 成 动 联 接
这 种 使 两 构 件 直 接 接 触并 能 产 生 一 定 运 动 的 联 接 , 称 为 运 动 副
两 构 件 组 成 运动 副 后 , 就 限 制 了 两 构 件 间 的 部 分 相 对 运 动 , 运 动 副 对于 构 件 间 相 对 运 动 的 这 种 限 制 称 为 约 束
机 构 就 是 由 若干 构 件 和 若 干 运 动 副 组 合 而 成 的 , 因 此 运 动 副 也 是 组 成机 构 的 主 要 要 素
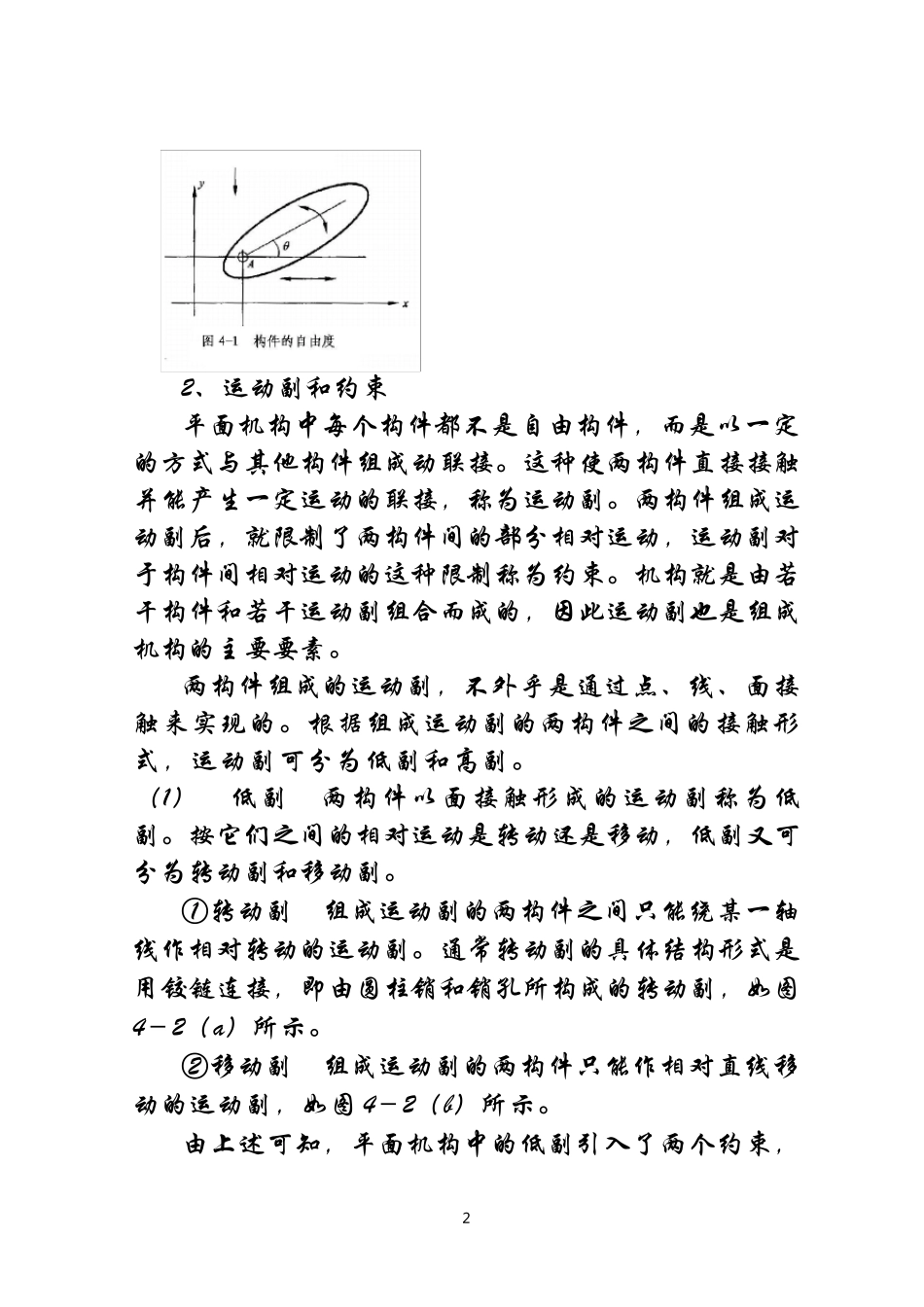
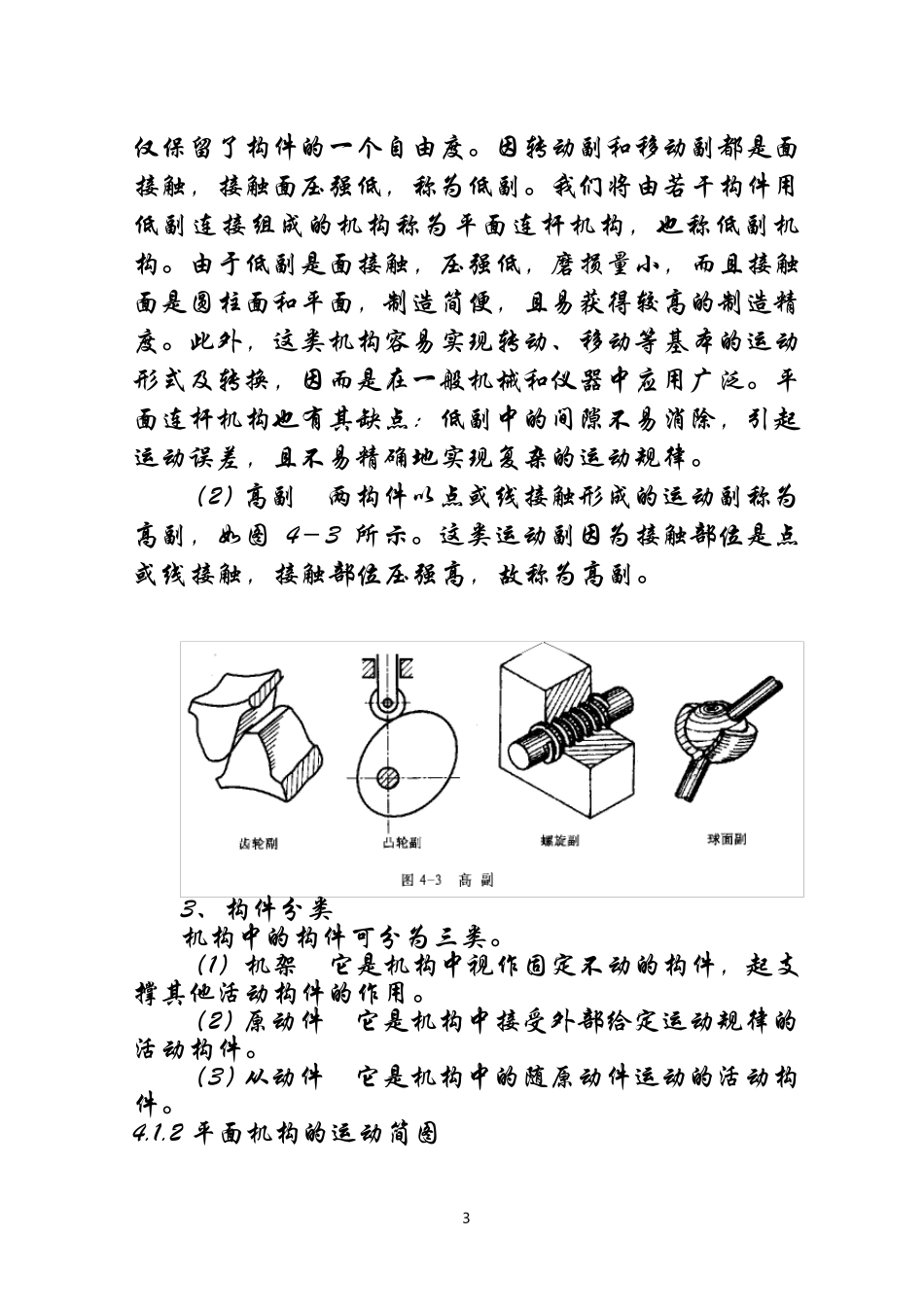
两 构 件 组 成 的 运 动 副 , 不 外 乎 是 通 过 点 、 线 、 面 接触 来 实 现 的
根 据 组 成 运 动 副 的 两 构 件 之 间 的 接 触 形式 , 运 动 副 可 分 为 低 副 和 高 副