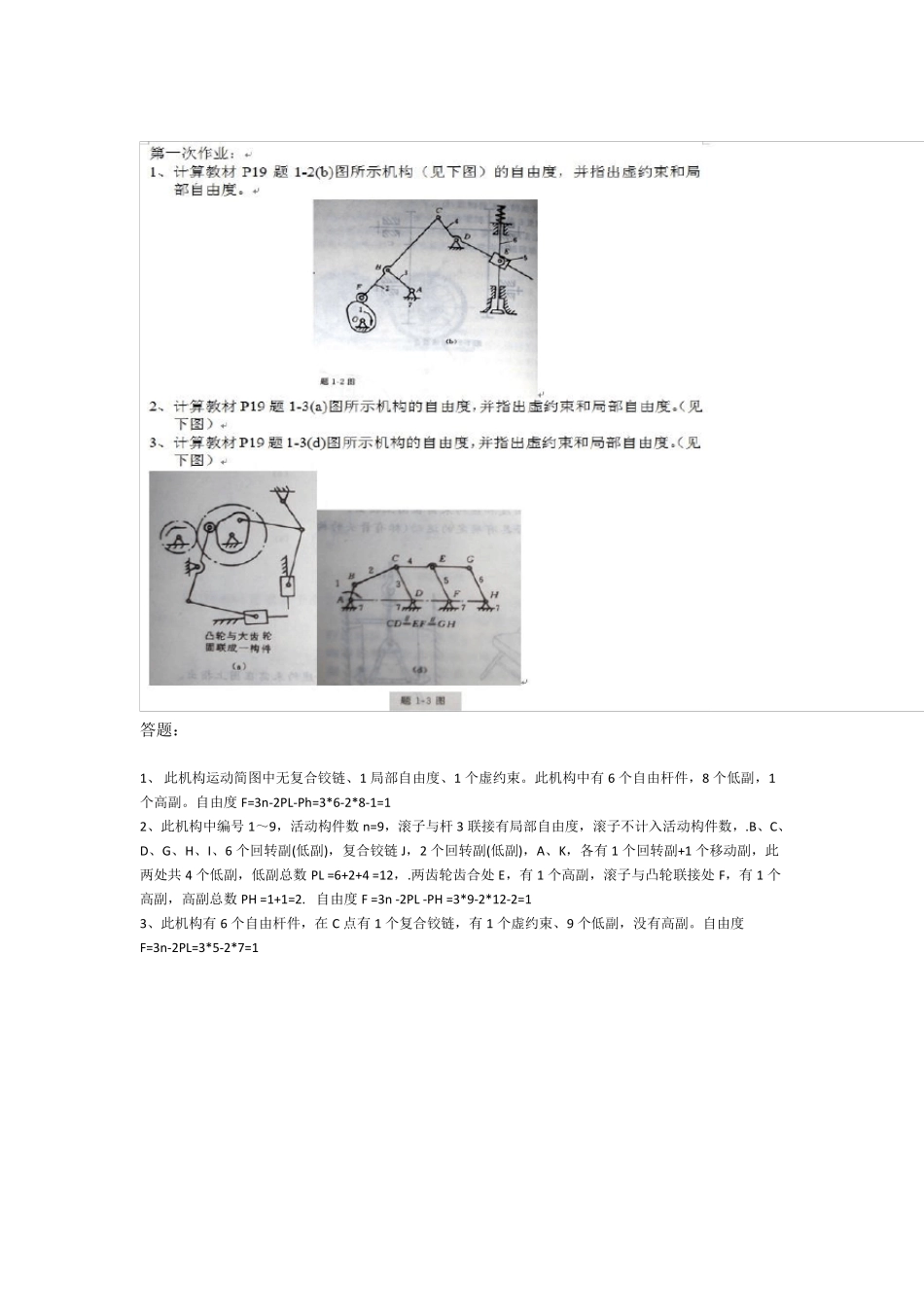
答题: 1、 此机构运动简图中无复合铰链、1 局部自由度、1 个虚约束
此机构中有 6 个自由杆件,8 个低副,1个高副
自由度 F=3n-2PL-Ph=3*6-2*8-1=1 2、此机构中编号 1~9,活动构件数 n=9,滚子与杆 3 联接有局部自由度,滚子不计入活动构件数,
B、C、D、G、H、I、6 个回转副(低副),复合铰链 J,2 个回转副(低副),A、K,各有 1 个回转副+1 个移动副,此两处共 4 个低副,低副总数 PL =6+2+4 =12,
两齿轮齿合处 E,有 1 个高副,滚子与凸轮联接处 F,有 1 个高副,高副总数 PH =1+1=2
自由度 F =3n -2PL -PH =3*9-2*12-2=1 3、此机构有 6 个自由杆件,在 C 点有 1 个复合铰链,有 1 个虚约束、9 个低副,没有高副
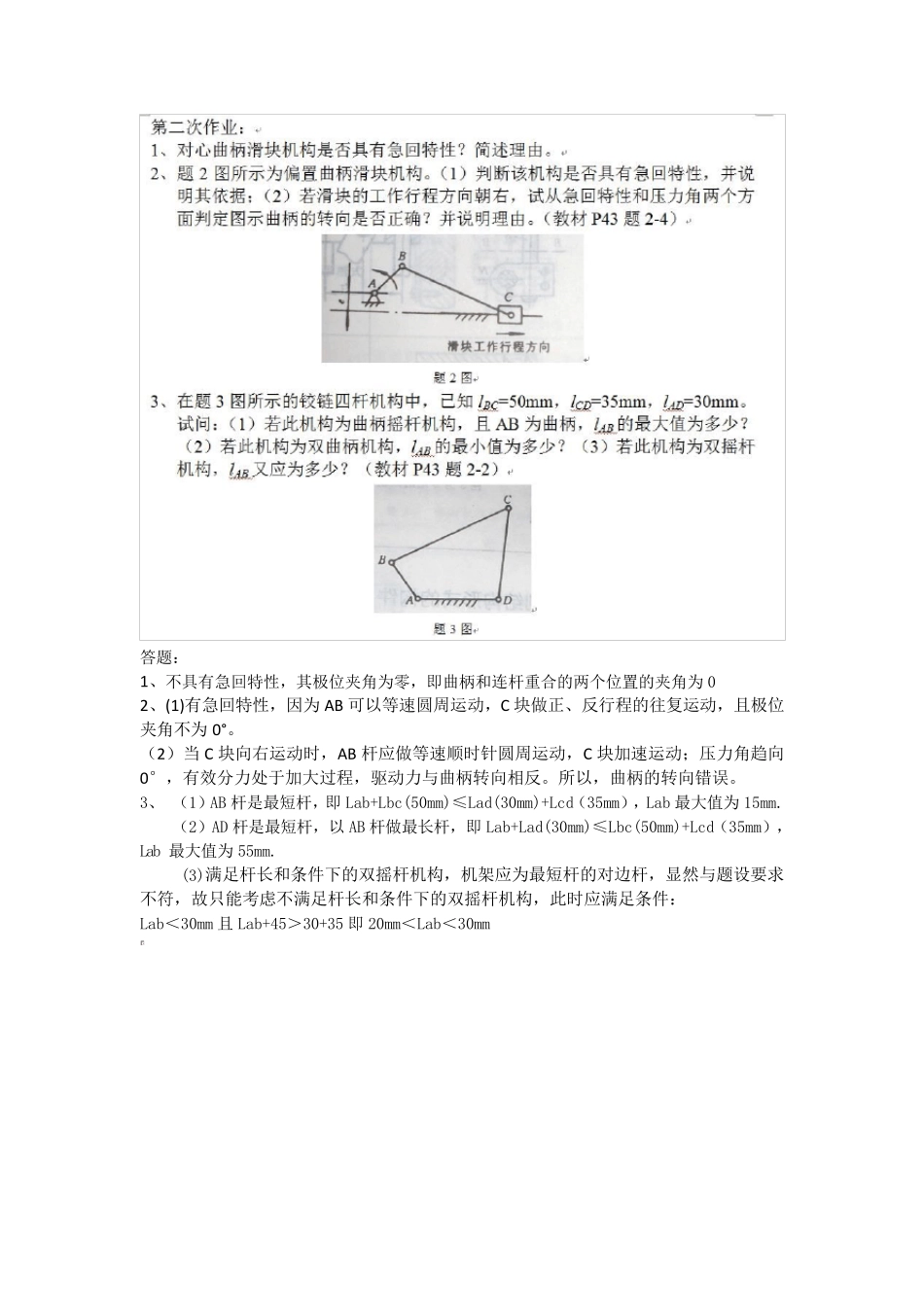
自由度F=3n-2PL=3*5-2*7=1 答题: 1、不具有急回特性,其极位夹角为零,即曲柄和连杆重合的两个位置的夹角为0 2、(1)有急回特性,因为AB 可以等速圆周运动,C 块做正、反行程的往复运动,且极位夹角不为0°
(2)当C 块向右运动时,AB 杆应做等速顺时针圆周运动,C 块加速运动;压力角趋向0°,有效分力处于加大过程,驱动力与曲柄转向相反
所以,曲柄的转向错误
3、 (1)AB 杆是最短杆,即Lab+Lbc(50mm)≤Lad(30mm)+Lcd(35mm),Lab 最大值为15mm
(2)AD 杆是最短杆,以AB 杆做最长杆,即Lab+Lad(30mm)≤Lbc(50mm)+Lcd(35mm),Lab 最大值为55mm
(3)满足杆长和条件下的双摇杆机构,机架应为最短杆的对边杆,显然与题设要求不符,故只能考虑不满足杆长和条件下的双摇杆机构,此时应满足条件: Lab<30mm 且Lab+45>30+35 即20mm<Lab<3