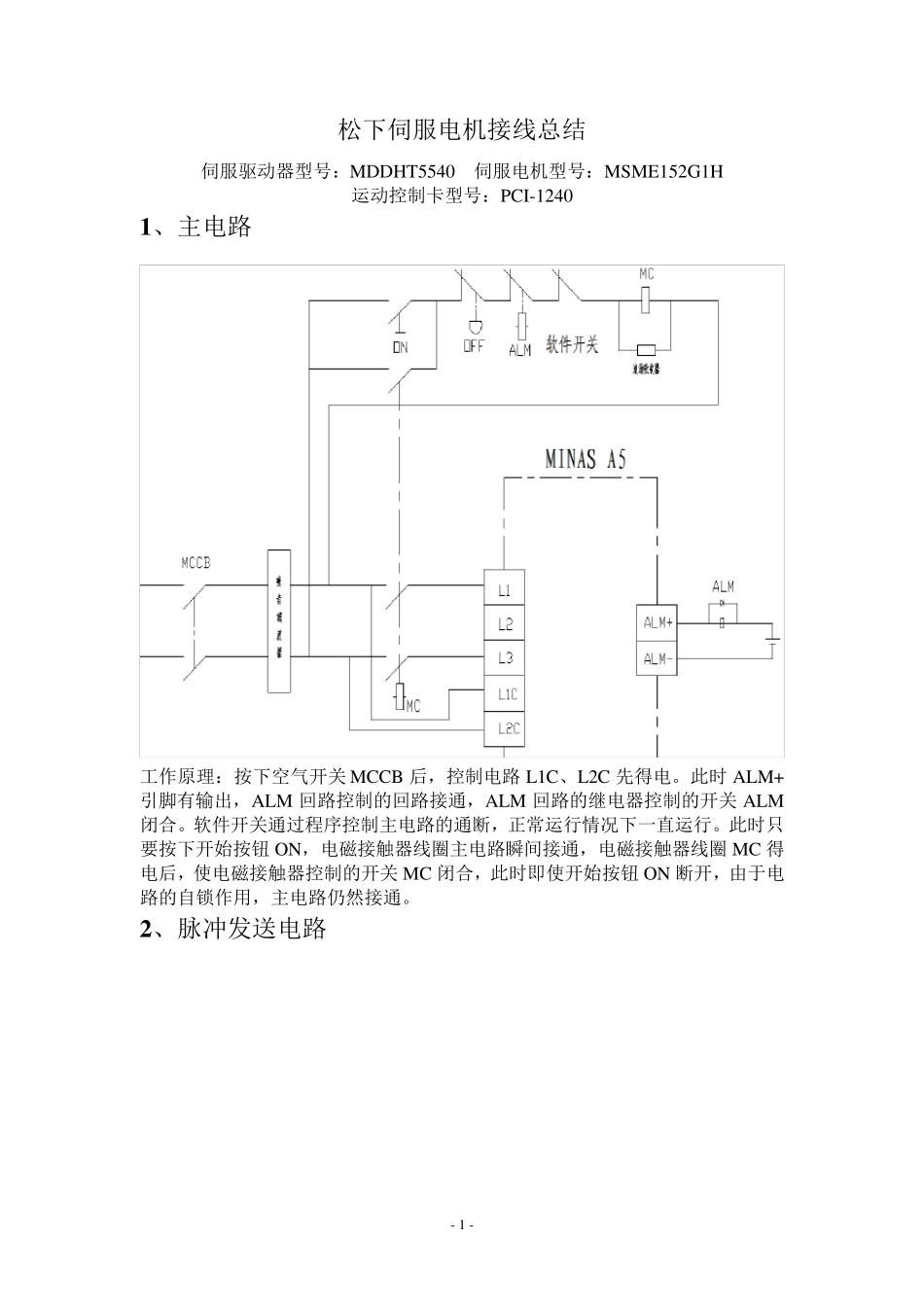
- 1 - 松下伺服电机接线总结 伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H 运动控制卡型号:PCI-1240 1 、主电路 工作原理:按下空气开关 MCCB 后,控制电路 L1C、L2C 先得电
此时 ALM+引脚有输出,ALM 回路控制的回路接通,ALM 回路的继电器控制的开关 ALM闭合
软件开关通过程序控制主电路的通断,正常运行情况下一直运行
此时只要按下开始按钮 ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈 MC 得电后,使电磁接触器控制的开关 MC 闭合,此时即使开始按钮 ON 断开,由于电路的自锁作用,主电路仍然接通
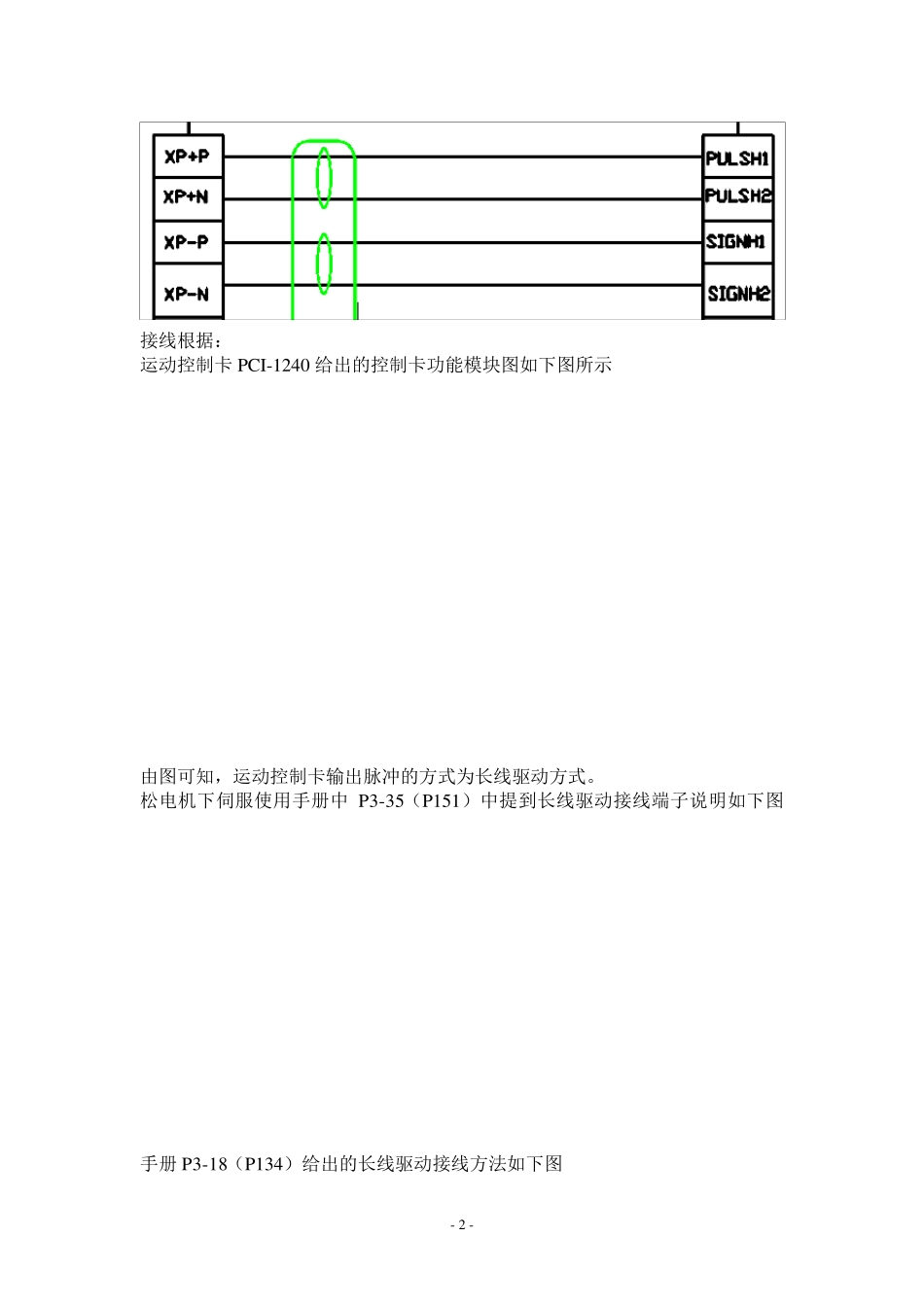
2 、脉冲发送电路 - 2 - 接线根据: 运动控制卡P CI-1240 给出的控制卡功能模块图如下图所示 由图可知,运动控制卡输出脉冲的方式为长线驱动方式
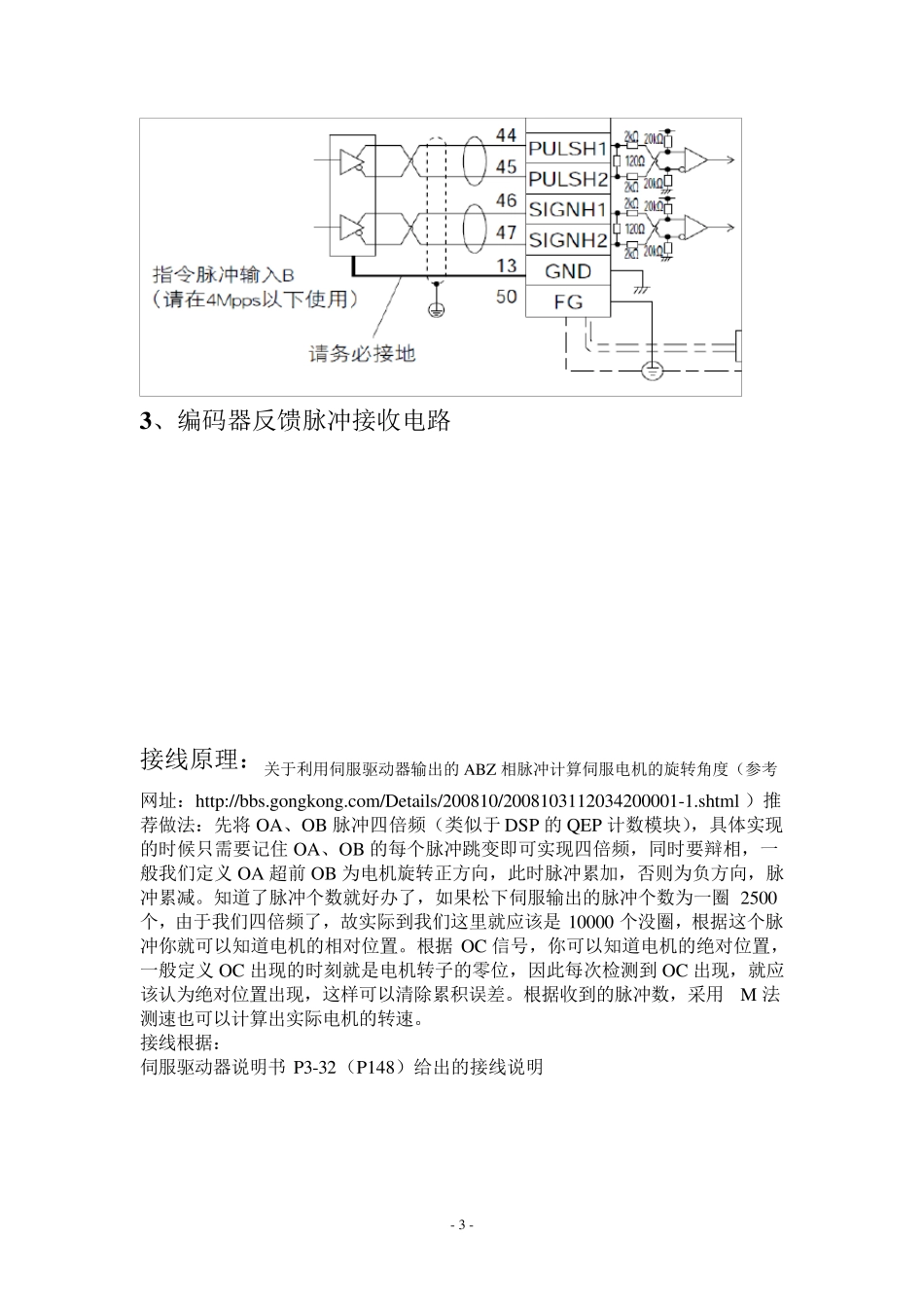
松电机下伺服使用手册中 P 3-35(P 151)中提到长线驱动接线端子说明如下图 手册 P 3-18(P 134)给出的长线驱动接线方法如下图 - 3 - 3 、编码器反馈脉冲接收电路 接线原理:关于利用伺服驱动器输出的 ABZ 相脉冲计算伺服电机的旋转角度(参考网址:http://bbs
gongkong
com/Details/200810/2008103112034200001-1
shtml )推荐做法:先将 OA、OB 脉冲四倍频(类似于 DSP 的 QEP 计数模块),具体实现的时候只需要记住 OA、OB 的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义 OA 超前 OB 为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减
知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈 2500个,由于我们四倍频了,故实际到我们这里就应该是 10000 个没圈,根据这个脉冲你就可以知道电机的相对位置
根据 OC 信号,你可以知道电机的绝