注意:系统只有在稳定的前提下,才能对稳态误差进行分析
定义式法求稳态误差:e=lime(t)=limsE(s)=lims[E(s)+E(s)]tT8sT0sT0rd=limsE(s)+limsE(s)sT0rsT0d=e+essrssd2
给定信号作用下的误差 E(s),E(s)=Q(s样(s)=sR(s)rrer1+G(s)H(s)扰动信号作用下的误差 E(s),E(s)=Q(s)D(s)=_
([2D(')基于 Simulink 控制系统的稳态误差分析(实验 nanana)一、实验目的掌握使用仿真环境进行控制系统稳态误差分析的方法
了解稳态误差分析的前提条件是系统处于稳定状态
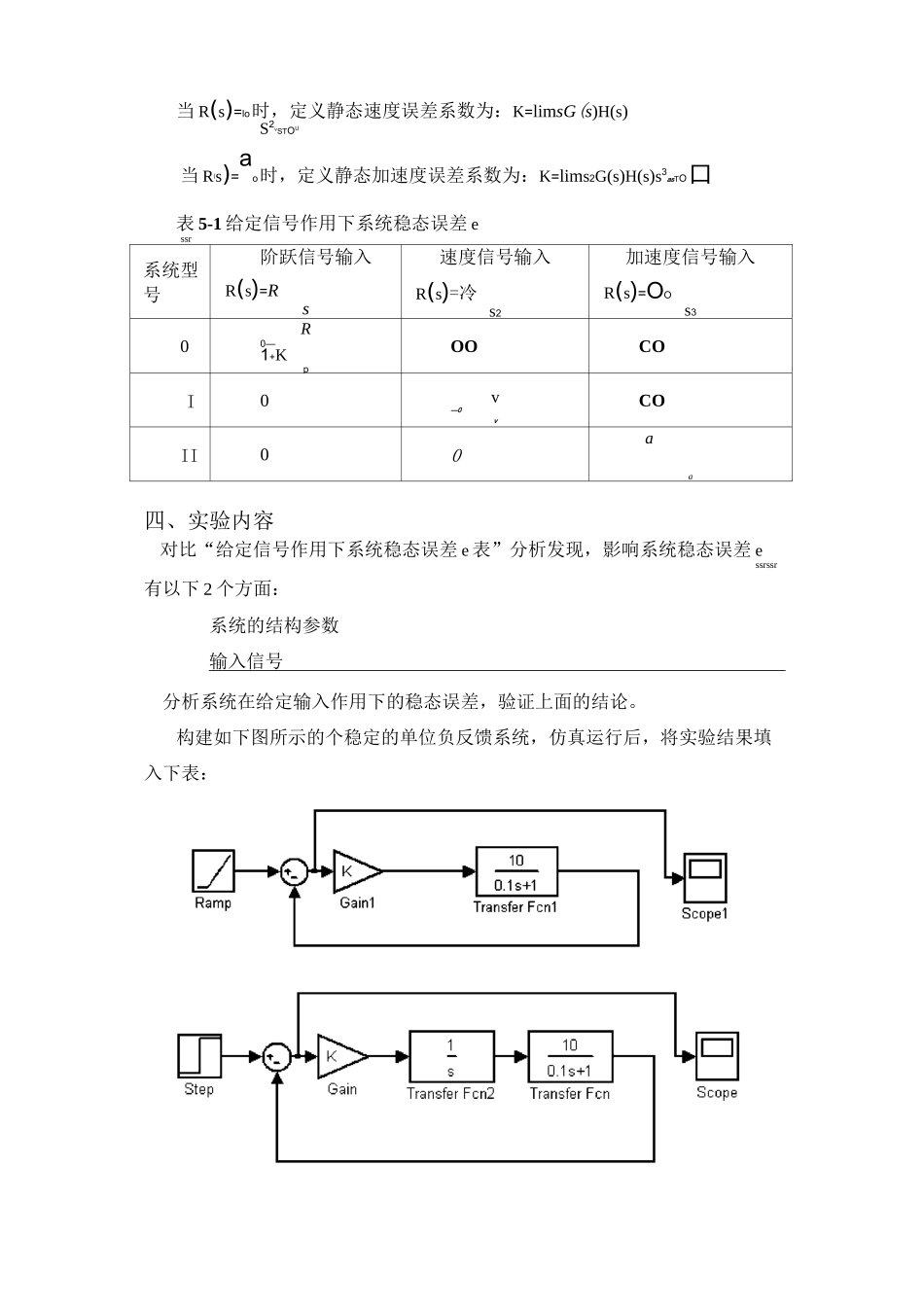
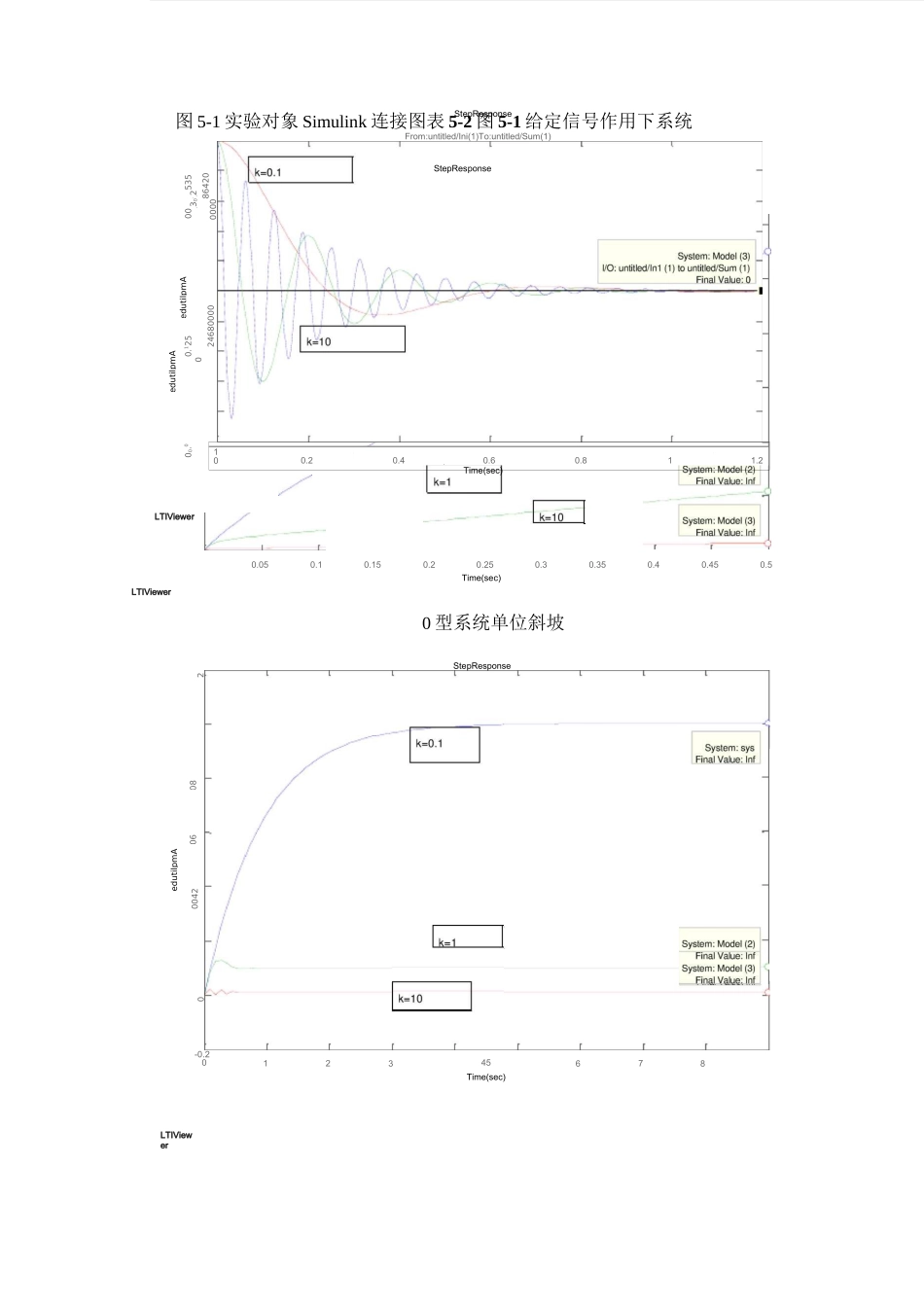
研究系统在不同典型输入信号作用下,稳态误差的变化
分析系统在扰动输入作用下的稳态误差
分析系统型次及开环增益对稳态误差的影响
二、实验设备和仪器
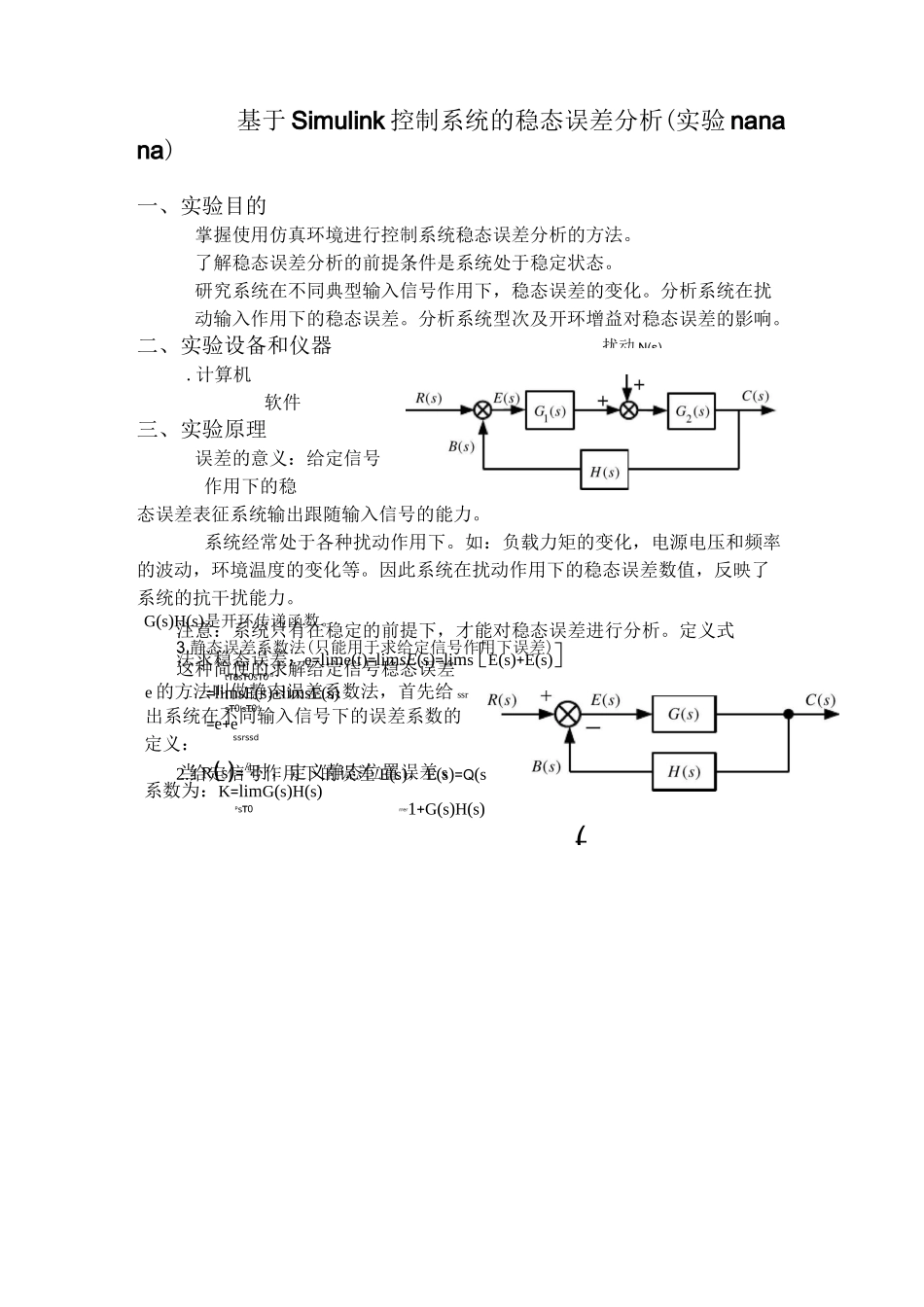
计算机软件三、实验原理误差的意义:给定信号作用下的稳态误差表征系统输出跟随输入信号的能力
系统经常处于各种扰动作用下
如:负载力矩的变化,电源电压和频率的波动,环境温度的变化等
因此系统在扰动作用下的稳态误差数值,反映了系统的抗干扰能力
G(s)H(s)是开环传递函数
静态误差系数法(只能用于求给定信号作用下误差)这种简便的求解给定信号稳态误差e 的方法叫做静态误差系数法,首先给 ssr出系统在不同输入信号下的误差系数的定义:当 R(s)=R时,定义静态位置误差 s系数为:K=limG(s)H(s)psT0扰动 N(s)当 R(s)=lo时,定义静态速度误差系数为:K=limsG(s)H(s)S2vSTOU当 R(s)=ao时,定义静态加速度误差系数为:K=lims2G(s)H(s)s3asTO口表 5-1 给定信号作用下系统稳态误差 essr系统型号阶跃信号输入R(s)=Rs速度信号输入R(s)=冷s2加速度信号输入R(s)=OOs30R