一、直流电机转速(开环)控制方法 改变加到直流电机电枢两端的直流驱动电压,即可改变电机的转速;改变该驱动电压的极性,即可改变电机的旋转方向
使用PWM(脉宽调制)方法,可以方便地改变加给电机电枢的平均电压的大小,其基本原理可由图1 说明
设Ui是三极管基极的控制电压,UM 为电机两端的直流电压,它们的波形如图2 所示,在一个周期T 内,它的平均电压UM 为 TtUccMU1 △ 令DTt 1△,称矩形波的占空比,可知,改变控制信号的占空比就可以改变电机的转速
图 1 图 2 二、直流电机的正反转控制电路 改变加给电枢的直流电压极性,即能改变电机旋转方向;方案之一是使用直流继电器来改变供电极性,另一种方案使用两组晶体三极管构成切换电路,图3示出电路之一, 图3 +UCCUiUmMUitUmUccTtΔ t1 74LS06 T 1 T 4 T 3 T 2 +Ucc+5V ABCi1i24
7KM其工作原理简述如下: 当A=1(高电平): 则B=0 →T1 导通→T2 导通; C=1 →T3 截上→T4 截上; 于是电流 i1 流经由机 M 的路径为:Ucc→T1→M→T2→地,电机正转 若 A=0(低电平): 则B=1 →T1 截上→T2 截上; C=0 →T3 导通→T4 导通; 于是电流 i2 的流径电机 M 的路径为:Ucc→T3→M→T4→地,电机反转
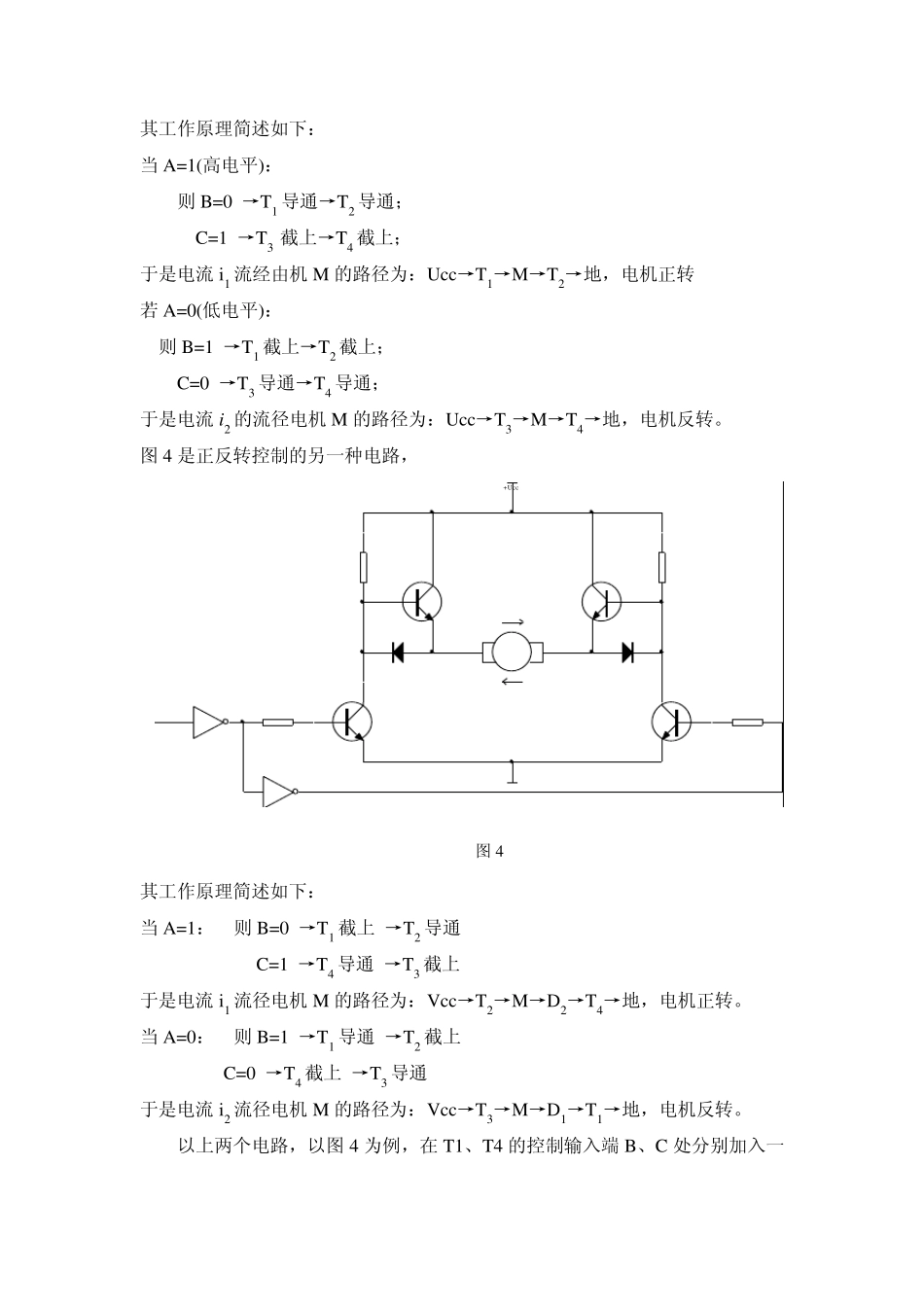
图 4 是正反转控制的另一种电路, 其工作原理简述如下: 当A=1: 则B=0 →T1 截上 →T2 导通 C=1 →T4 导通 →T3 截上 于是电流 i1 流径电机 M 的路径为:Vcc→T2→M→D2→T4→地,电机正转
当A=0: 则B=1 →T1 导通 →T2 截上 C=0 →T4 截上 →T3 导通 于是电流 i2 流径电机 M 的路径为:Vcc→T3→M→D1→T1→地,