盾构导向系统横向比较 1、比较的导向系统 SLS-T 盾构导向系统(简称 SLS-T) MTG-T 盾构导向系统(简称 MTG-T) ROBOTEC 盾构导向系统(简称 ROBOTEC) ZED GLOBAL 盾构导向系统(简称 ZED GLOBAL) PPS 盾构导向系统(简称 PPS) RMS-D 盾构导向系统(简称 RMS-D) 2、关键技术 1
1 系统原理 1
1 激光靶系统 图 1 激光靶偏航角测量示意图 如图 1 所示,激光靶的关键技术是精确感应激光束与激光靶轴线间的偏航角度,激光靶集成有精密角度传感器,能精确测定激光靶的转动角及俯仰角
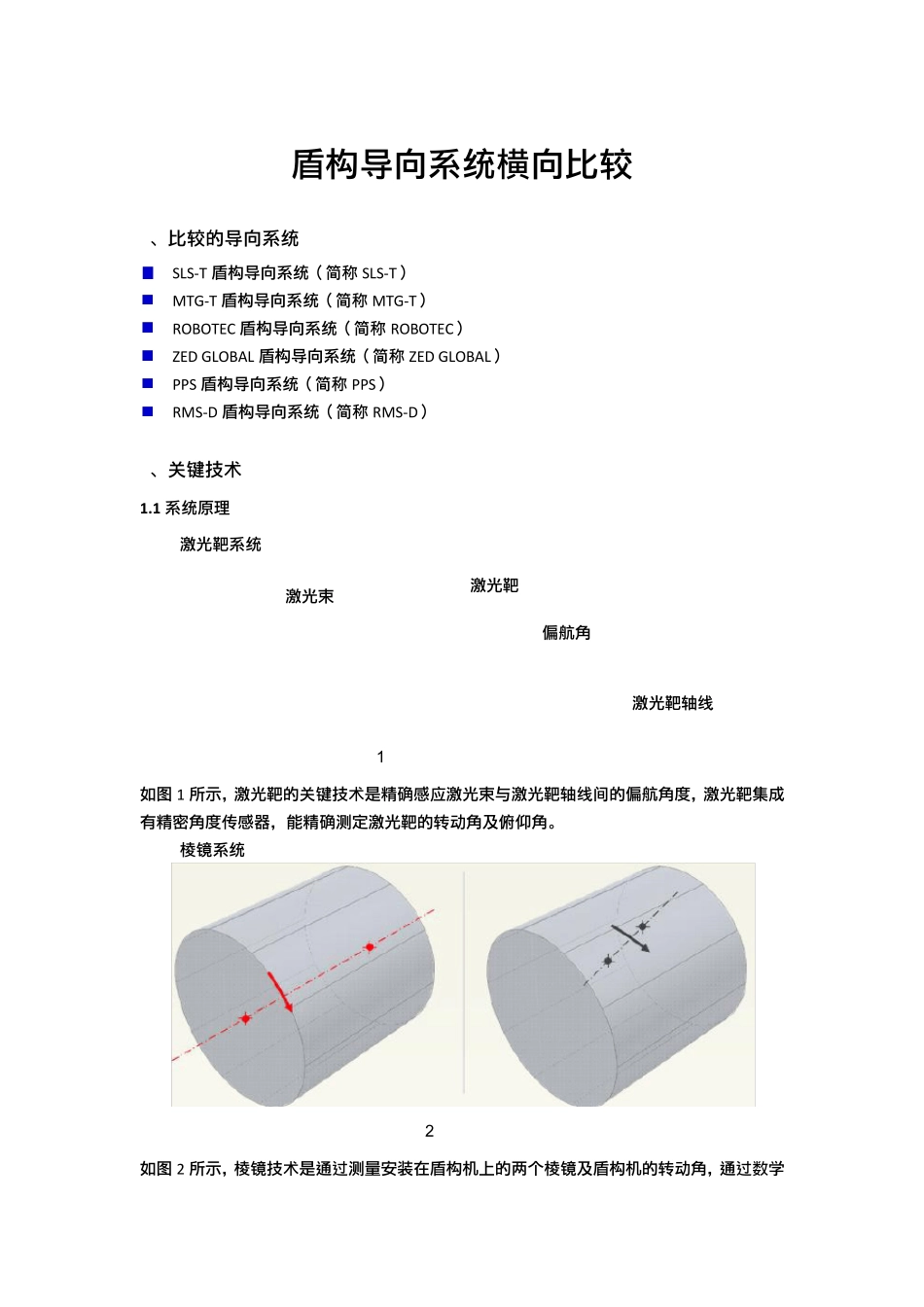
2 棱镜系统 图 2 棱镜技术原 如图 2 所示,棱镜技术是通过测量安装在盾构机上的两个棱镜及盾构机的转动角,通过数学激光束 激光靶 偏航角 激光靶轴线 的方法计算盾构的位置姿态
3 两种原理的差别 安装 1)、激光靶安装 图 3 激光靶安装 激光靶系统在盾构机上仅需安装一个激光靶设备,易于安装、保护和维护
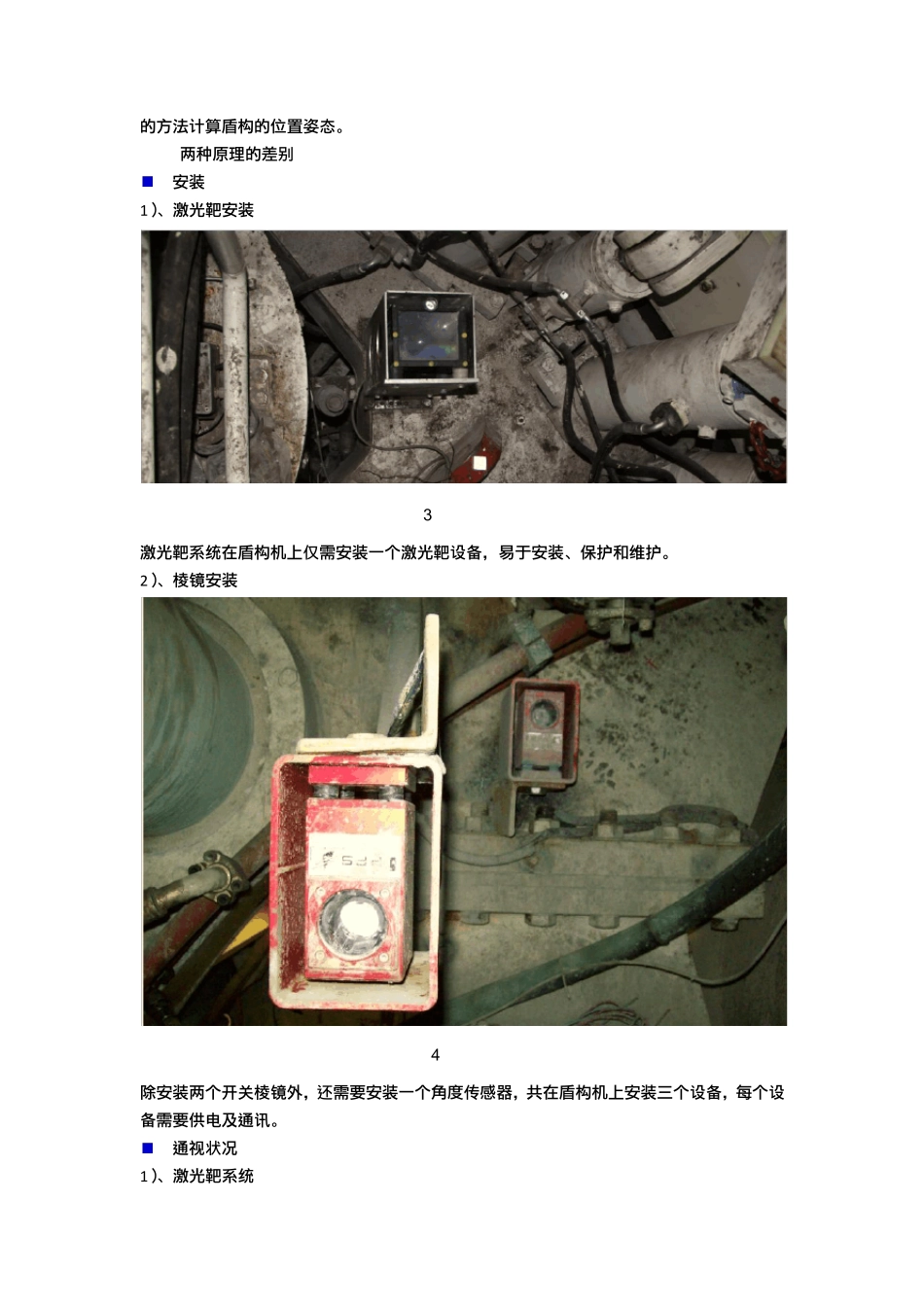
2)、棱镜安装 图 4 棱镜安装 除安装两个开关棱镜外,还需要安装一个角度传感器,共在盾构机上安装三个设备,每个设备需要供电及通讯
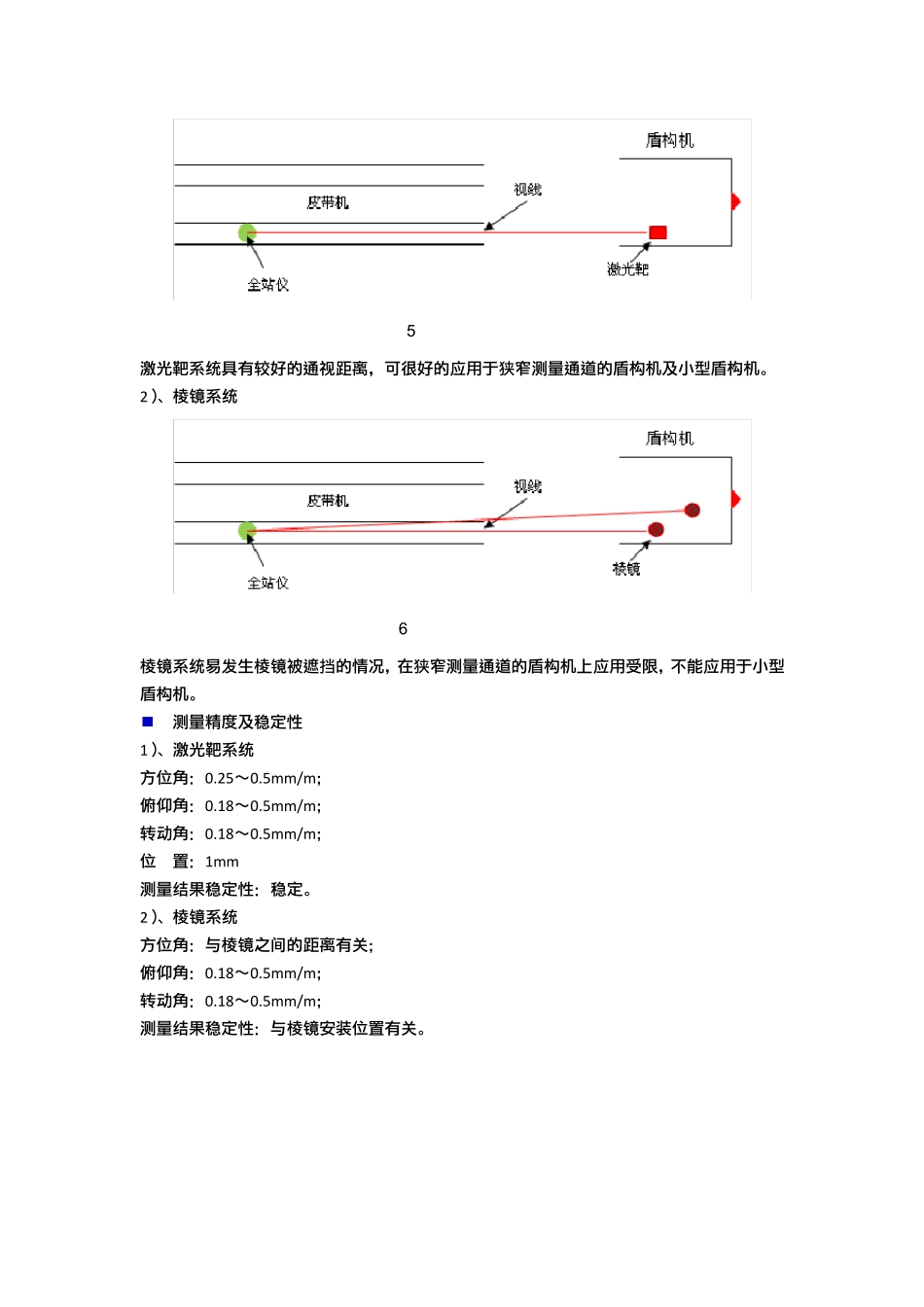
通视状况 1)、激光靶系统 图 5 激光靶通视状况 激光靶系统具有较好的通视距离,可很好的应用于狭窄测量通道的盾构机及小型盾构机
2)、棱镜系统 图 6 棱镜系统通视状况 棱镜系统易发生棱镜被遮挡的情况,在狭窄测量通道的盾构机上应用受限,不能应用于小型盾构机
测量精度及稳定性 1)、激光靶系统 方位角:0
5m m /m ; 俯仰角:0
5m m /m ; 转动角:0
5m m /m ; 位 置:1m m 测量结果稳定性:稳定
2)、棱镜系统 方位角:与棱镜之间的距离有关; 俯仰角:0
5m m /m ; 转动角:0