《现代控制理论》第 6 章习题解答 6
1 分 析 开 环 状 态 估 计 方 案 的 误 差 动 态 特 性
( 说 明 开 环 形 式 的 观 测 器 其 误 差 的 衰 减 是 不 变的 , 而 闭 环 形 式 的 观 测 器 其 误 差 的 衰 减 是 可 以 改 变 的 )
答 : 针 对 线 性 时 不 变 系 统 xAxBuyCx (1 ) 开 环 形 式 的 观 测 器 : xAxBu 误 差 动 态 方 程 为 exxAe 其 初 始 误 差(0 )e的 时 间 响 应 为 ( )(0 )Ate te e 误 差 的 衰 减 是 由 系 统 模 型 的 状 态 矩 阵 决 定 的 , 无 法 改 变
(2 ) 闭 环 形 式 的 观 测 器 :()()xAxBuL yCxALC xBuLy 误 差 动 态 方 程 为 ()()exxAxBuALC xBuLyALC e 其 初 始 误 差(0 )e的 时 间 响 应 为 ()( )(0 )A LC te tee 误 差 的 衰 减 由 ALC决 定 , 其 中 A 、C 由 系 统 模 型 确定 , 而 观 测 器 增益矩 阵 L 由 设计 者决定 , 所以 误 差 的 衰 减 是 可 以 改 变 的
2 为 什么要构建状 态 观 测 器
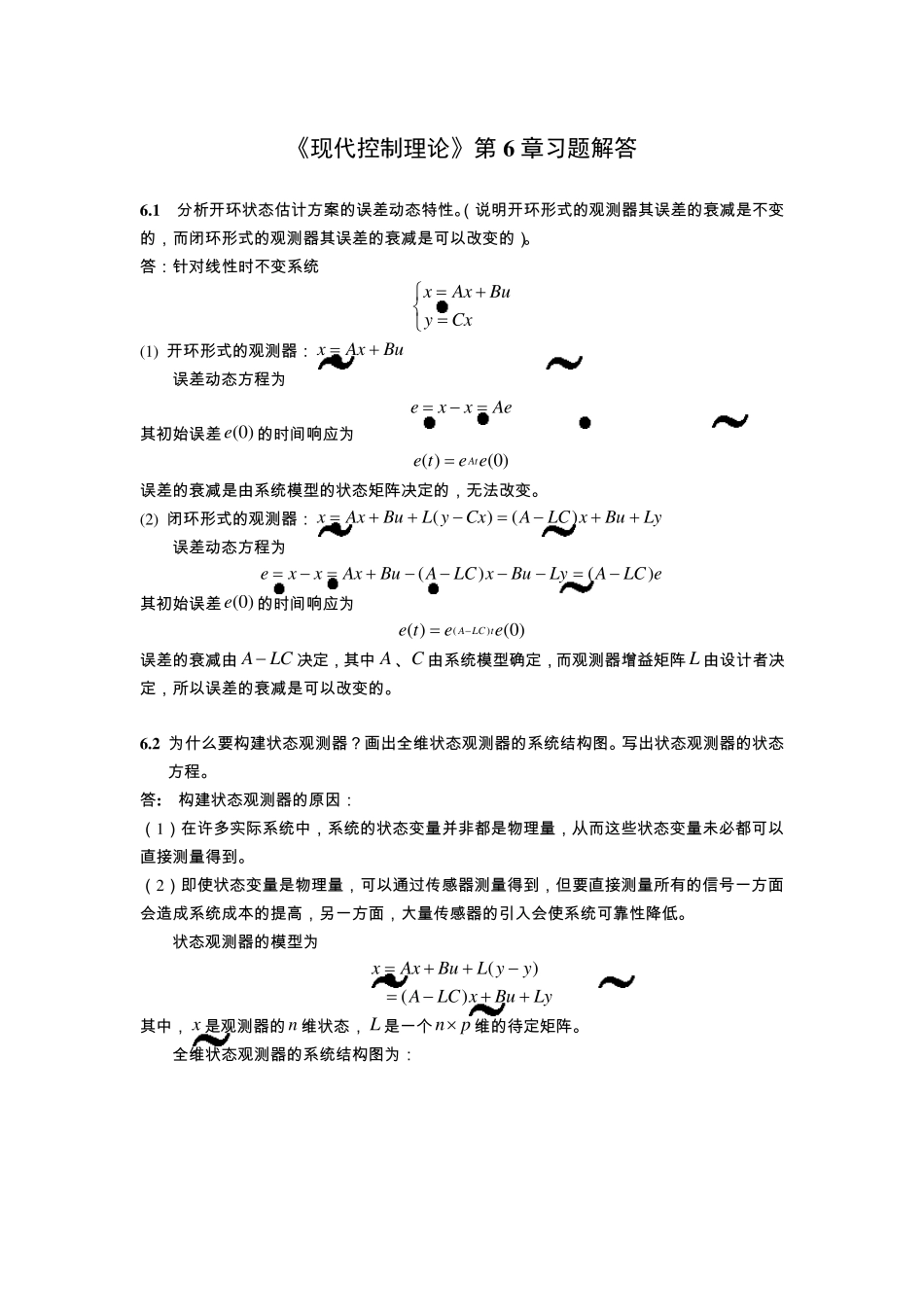
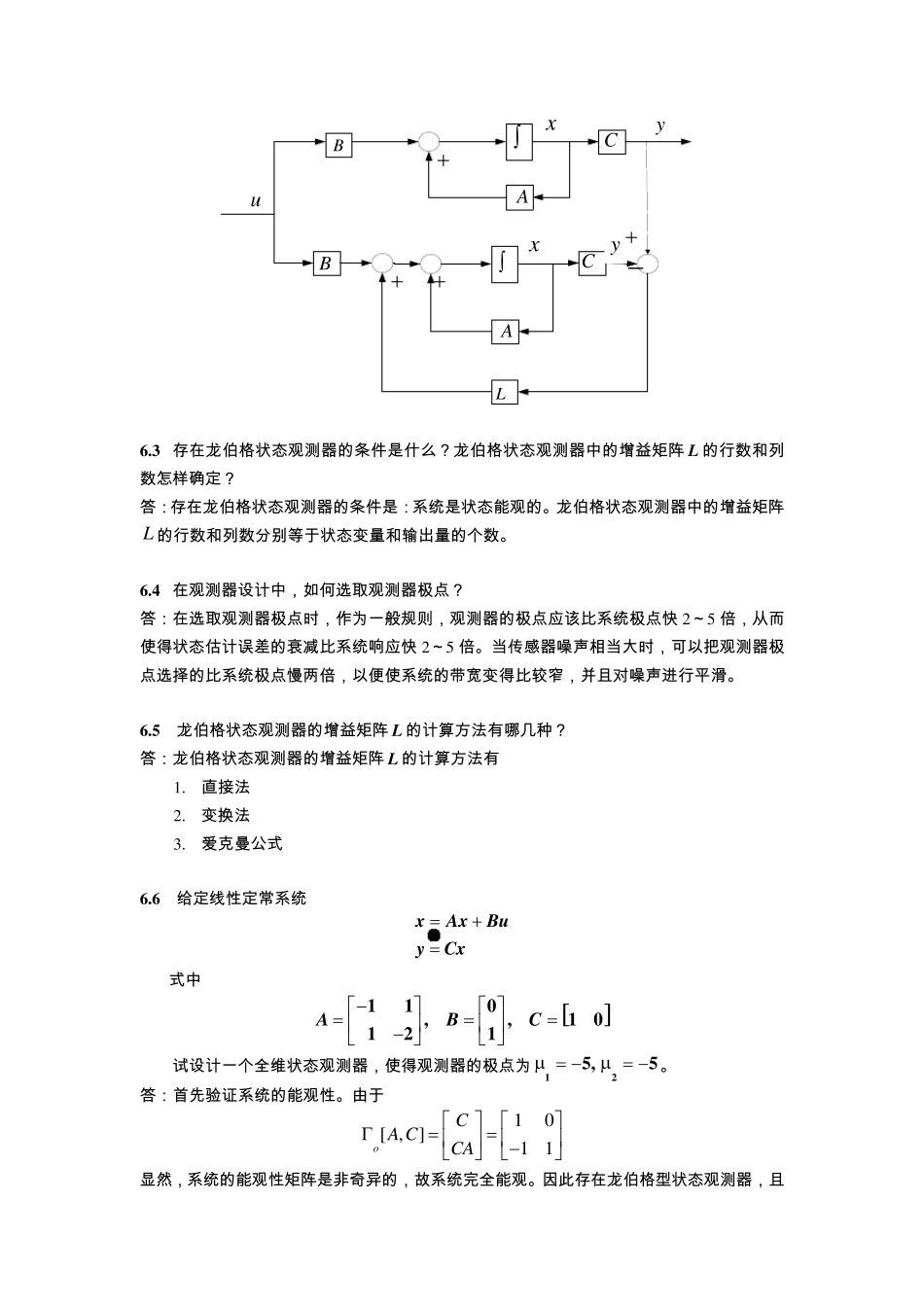
画出全维状 态 观 测 器 的 系 统 结构图
写出状 态 观 测 器 的 状 态方 程
答 : 构建状 态 观 测 器 的 原因: ( 1 ) 在许多实际系 统 中 , 系 统 的 状 态 变 量并非都是 物理量, 从而 这些状 态 变 量未必都可 以直接测 量得到
( 2 ) 即使状 态 变 量是 物理量, 可 以 通过传感器 测 量得到, 但要直接测 量所有的 信号一方 面会