动力定位技术背景 1
1 国外动力定位技术发展 目前,国际上主要的动力定位系统制造商有 Kongsberg 公司、Conv erteam 公司、Nau tronix 公司等
下面分别介绍动力定位系统各个关键组成部分的技术发展现状
1.动力定位控制系统 1)测量系统 测量系统是指动力定位系统的位置参考系统和传感器
国内外动力定位控制系统生产厂家均根据船舶的作业使命选择国内外各专业厂家的产品
位置参考系统主要采用 DGPS,水声位置参考系统主要选择超短基线或长基线声呐,微波位置参考系统可选择 Artemis Mk 4,张紧索位置参考系统可选择 LTW Mk,激光位置参考系统可选择Fanbeam Mk 4,雷达位置参考系统可选择 RADiu s 500X
罗经、风传感器、运动参考单元等同样选择各专业生产厂家的产品
2)控制技术 20 世纪 60 年代出现了第一代动力定位产品,该产品采用经典控制理论来设计控制器,通常采用常规的 PID 控制规律,同时为了避免响应高频运动,采用滤波器剔除偏差信号中的高频成分
20 世纪 70 年代中叶,Balchen 等提出了一种以现代控制理论为基础的控制技术-最优控制和卡尔曼滤波理论相结合的动力定位控制方法,即产生了第二代也是应用比较广泛的动力定位系统
近年来出现的第三代动力定位系统采用了智能控制理论和方法,使动力定位控制进一步向智能化的方向发展
智能控制方法主要体现在鲁棒控制、模糊控制、非线性模型预测控制等方面
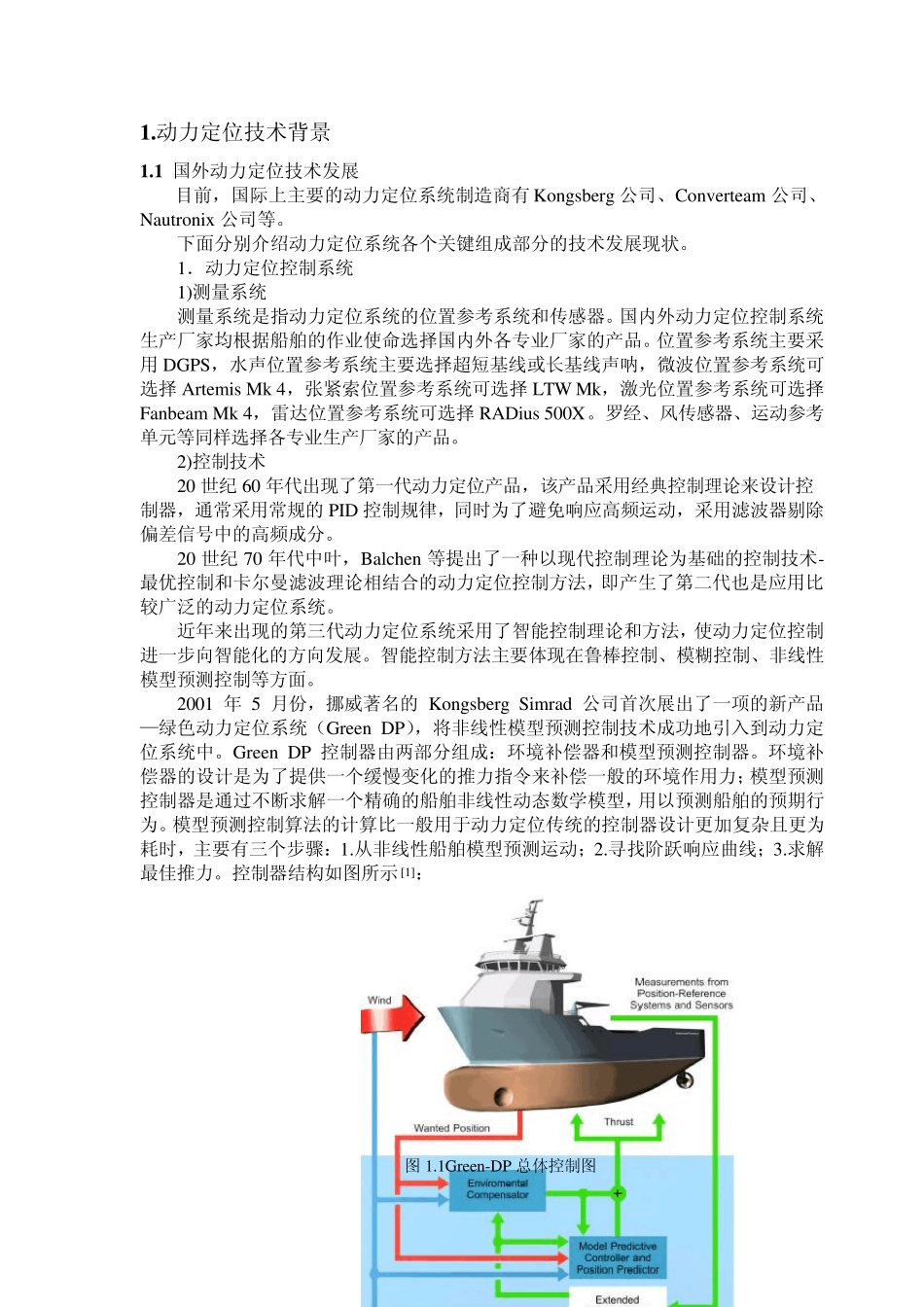
2001 年 5 月份,挪威著名的 Kongsberg Simrad 公司首次展出了一项的新产品—绿色动力定位系统(Green DP),将非线性模型预测控制技术成功地引入到动力定位系统中
Green DP 控制器由两部分组成:环境补偿器和模型预测控制器
环境补偿器的设计是为了提供一个缓慢变化的推力指令来补偿一般的环境作