MechanicalAMESIM 机械库包含了用于构建一维平动和转动机械系统的元件模块,可独立用于完整的一维机械系统建模
在 AMESim 中,为子模型设置参数的时候,可以使用表达式来表示,尤其是对于表达式计算结果不是有限数的时候
AMESim 所使用的外部变量的符号约定也很重要:对于自身有方向的变量,正号表示与箭头方向一致
(下面通过质量块进行详细讲解)如何设定重力方向
可在质量块的参数里面设置角度
系统认为向下是正方向,默认重力加速度是 9
80665m/s/s
通常情况下是不使用该图标的,除非是想改变重力加速的 g
在下图模型中(弹簧自由伸长),当设置质量块的初始角度为 0 时,仿真完成后质量块的速度一直为 0;如果设置初始角度为 90 度,则速度成正弦波变化
zeroforcesourceIconname:zeroforcesourcezerolinearspeedsourceIconnaniie:zerospeedsource子模型:FORC-conversionofsignalinputintoaforceinN 将无单位的信号转换为同等大小的、以 N 为单位的力
信号转换为线性速度,并计算出位移
信号转换为线性位移,并计算出速度
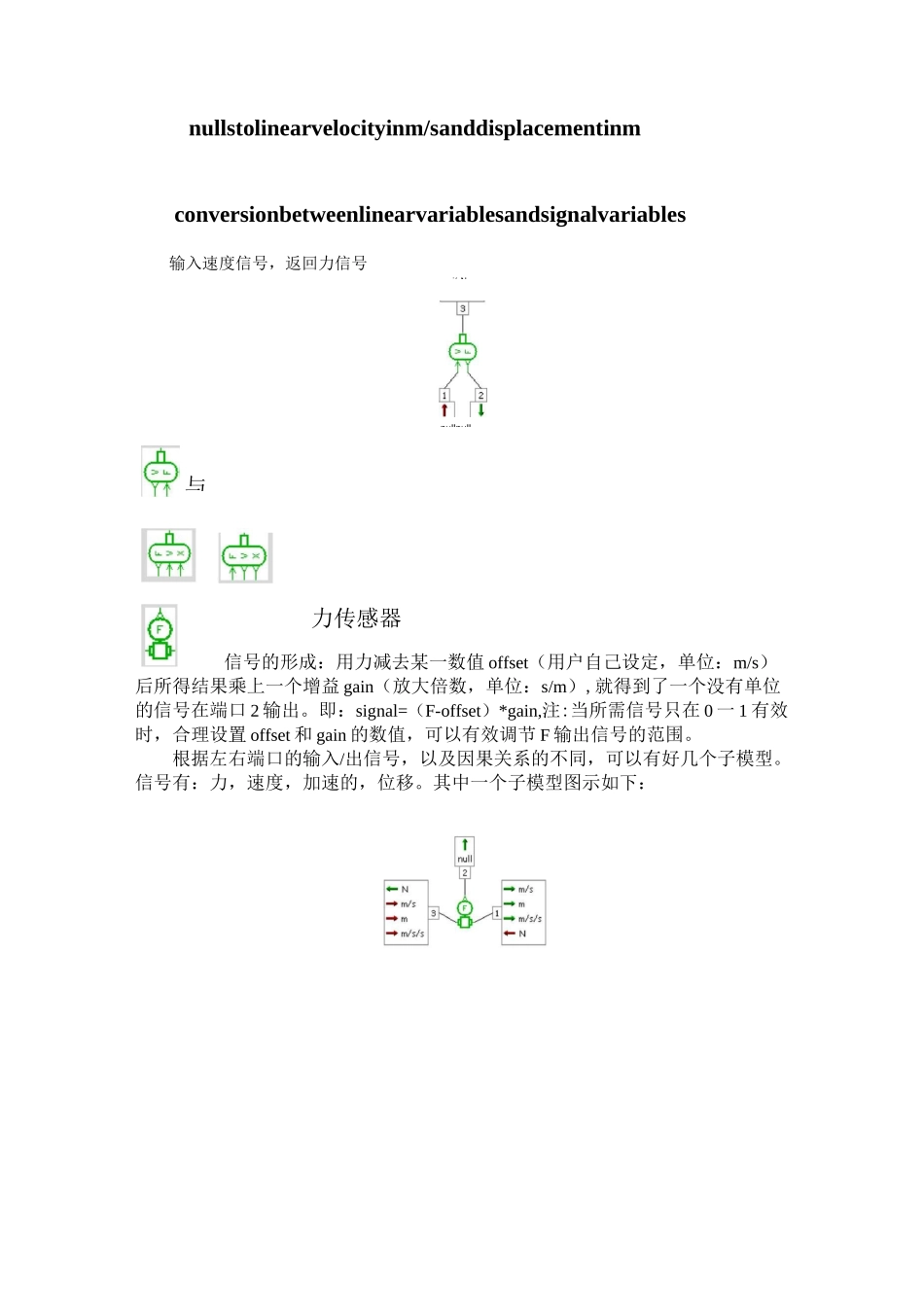
nullstolinearvelocityinm/sanddisplacementinmconversionbetweenlinearvariablesandsignalvariables输入速度信号,返回力信号力传感器信号的形成:用力减去某一数值 offset(用户自己设定,单位:m/s)后所得结果乘上一个增益 gain(放大倍数,单位:s/m),就得到了一个没有单位的信号在端口 2 输出
即:signal=(F-offset)*gain,注:当所需信号只在 0 一 1 有效时,合理设置 offset 和 gain 的数值,可以有效