无人机航测内业处理实验报告一、实验目的在 phtoscanContextCaptureMaster 建立的房子的建筑三维模型,将拍摄的4 个侧面和房顶的照片贴到已建成的三维建筑模型中
学phtoscanContextCaptureMaster 进行建筑三维模型贴图的技术与方法
二、实验设备(环境)及要求操作系统:MicrosoftWindows10制作软件:phtoscanContextCaptureMaster三、实验过程与实验结果(一)整体建模的分析与预处理在已建立的建筑三维模型的基础上,为了获得良好的重建效果,需要对源照片(背景、转台、意外前景等)上所有不相关的元素进行屏蔽
同时结合照片对整个模型的贴图进行整体的分析
其中主要为:1
选择对于矩形形状的无关元素;主要使用智能剪刀2
要选择不规则形状区域在照片中;主要使用智能涂料3
要屏蔽统一背景的图像使用魔法棒工具
重复每个照片的背景(不相关的元素)应该被掩盖的描述的过程
蒙面区域可以忽略(二)建模的步骤建模主要分成三个阶段;对齐照片、构建密集点云、生成网格
对齐照片(1)在此阶段,PhotoScan 为每张照片细化相机位置,并建立点云模型
选择对齐照片命令从工作流菜单
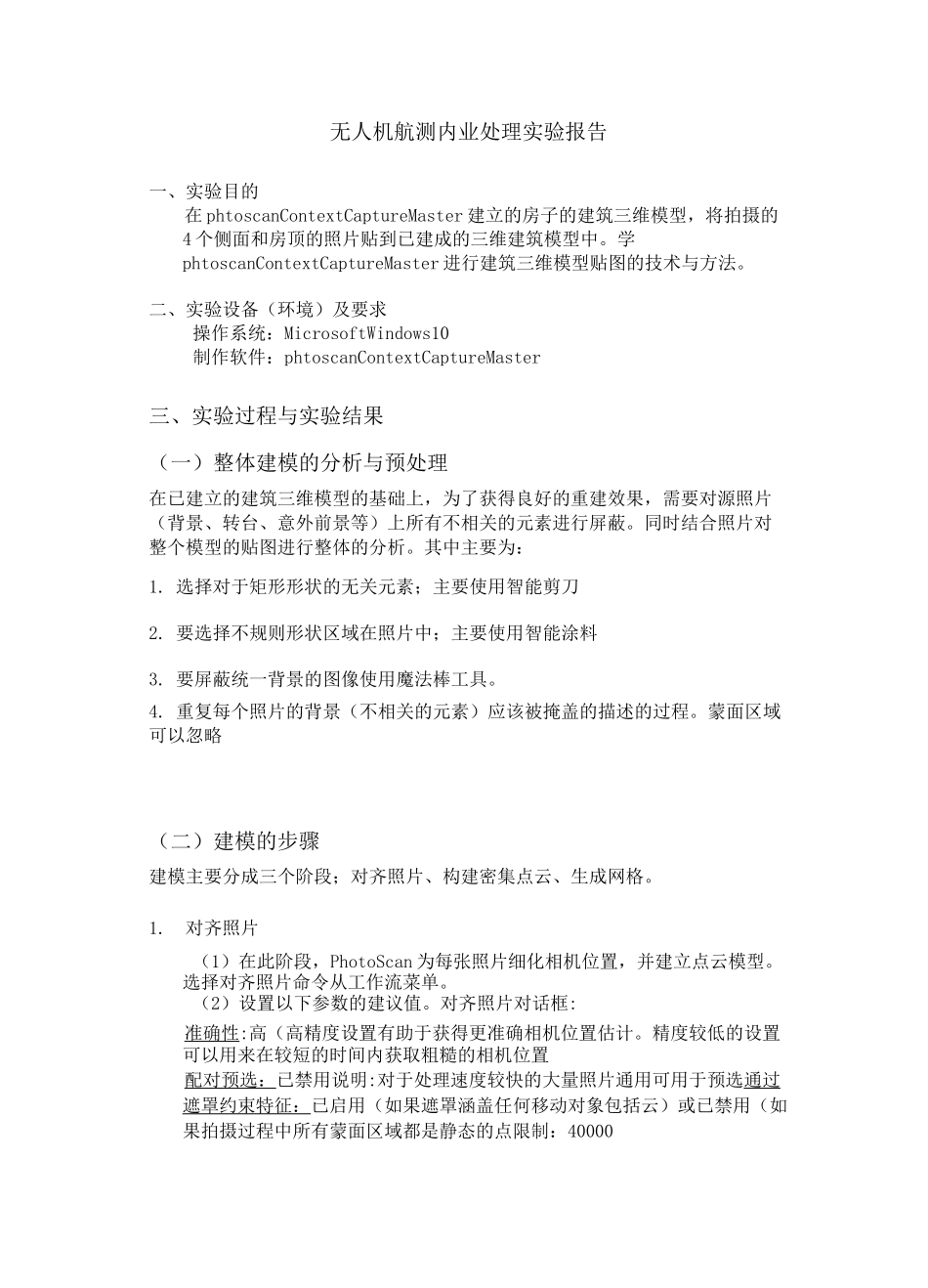
(2)设置以下参数的建议值
对齐照片对话框:准确性:高(高精度设置有助于获得更准确相机位置估计
精度较低的设置可以用来在较短的时间内获取粗糙的相机位置配对预选:已禁用说明:对于处理速度较快的大量照片通用可用于预选通过遮罩约束特征:已启用(如果遮罩涵盖任何移动对象包括云)或已禁用(如果拍摄过程中所有蒙面区域都是静态的点限制:40000单击好的按钮开始照片对齐
(3)完成照片对齐后,细化边框位置和方向以适应对象:(4)此步骤是可选的,因为 PhotoScan 会自动计算边界框的尺寸和位置
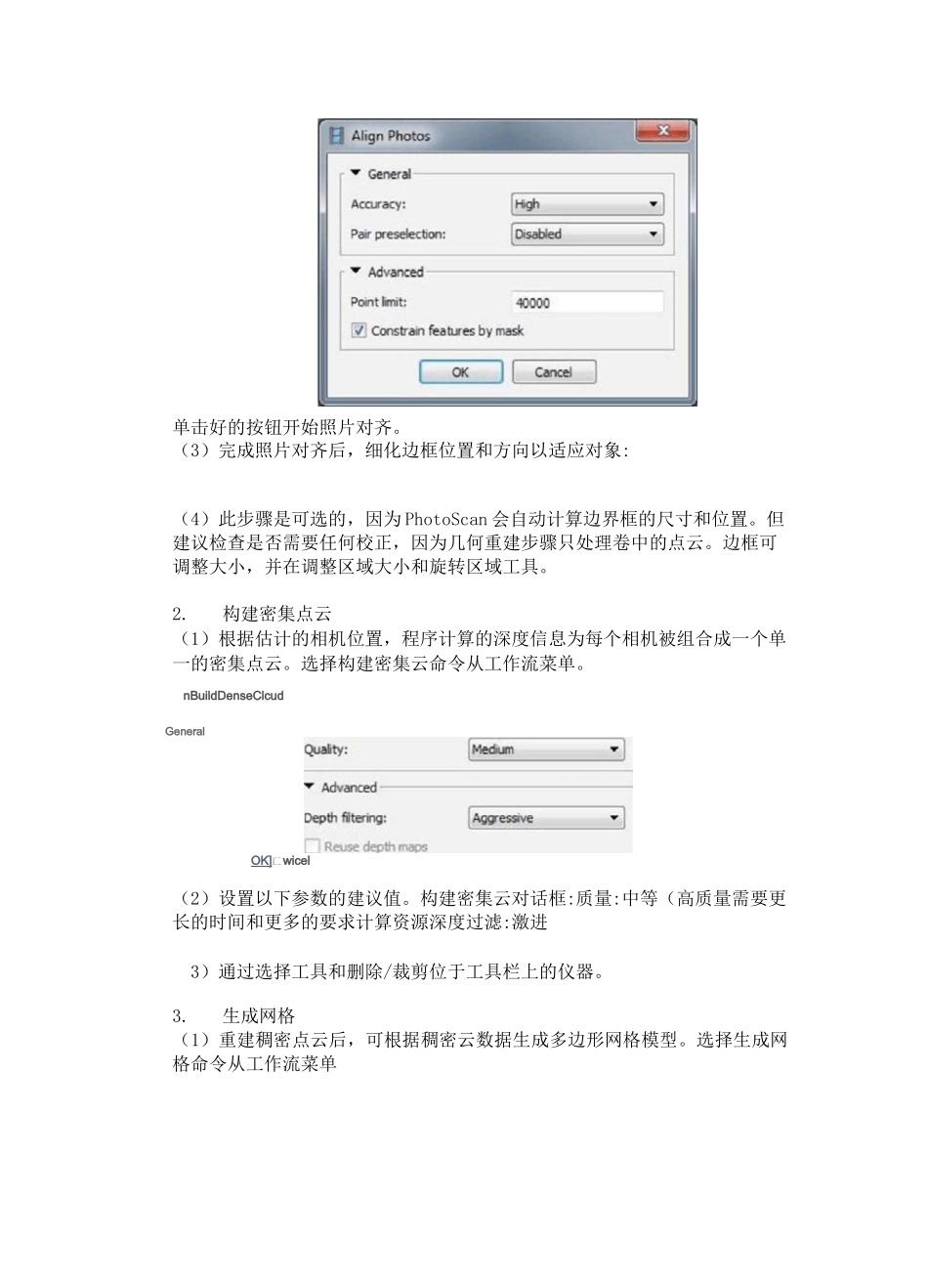
但建议检查是否需要任何校正,因为几何重建步骤只处理卷