51 单片机 PID 算法程序(一)PID 算法(原创文章,请注明出处 blog
ednchina
/tengjingshu )比例,积分,微分的线性组合,构成控制量 u(t),称为:比例(Proportional)、积分(Integrating)、微分(Differentiation)控制,简称PID 控制图 1控制器公式在实际应用中,可以根据受控对象的特性和控制的性能要求,灵活地采纳不同的控制组合,构成比例(P)控制器 比例+积分(PI)控制器 比例+积分+微分(PID)控制器式中或 式中控制系统中的应用在单回路控制系统中,由于扰动作用使被控参数偏离给定值,从而产生偏差
自动控制系统的调节单元将来自变送器的测量值与给定值相比较后产生的偏差进行比例、积分、微分(PID)运算,并输出统一标准信号,去控制执行机构的动作,以实现对温度、压力、流量、也为与其他工艺参数的自动控制
比例作用 P 只与偏差成正比;积分作用 I 是偏差对时间的积累;微分作用 D是偏差的变化率;比例(P)控制比例控制能迅速反应误差,从而减少稳态误差
除了系统控制输入为 0 和系统过程值等于期望值这两种情况,比例控制都能给出稳态误差
当期望值有一个变化时,系统过程值将产生一个稳态误差
但是,比例控制不能消除稳态误差
比例放大系数的加大,会引起系统的不稳定
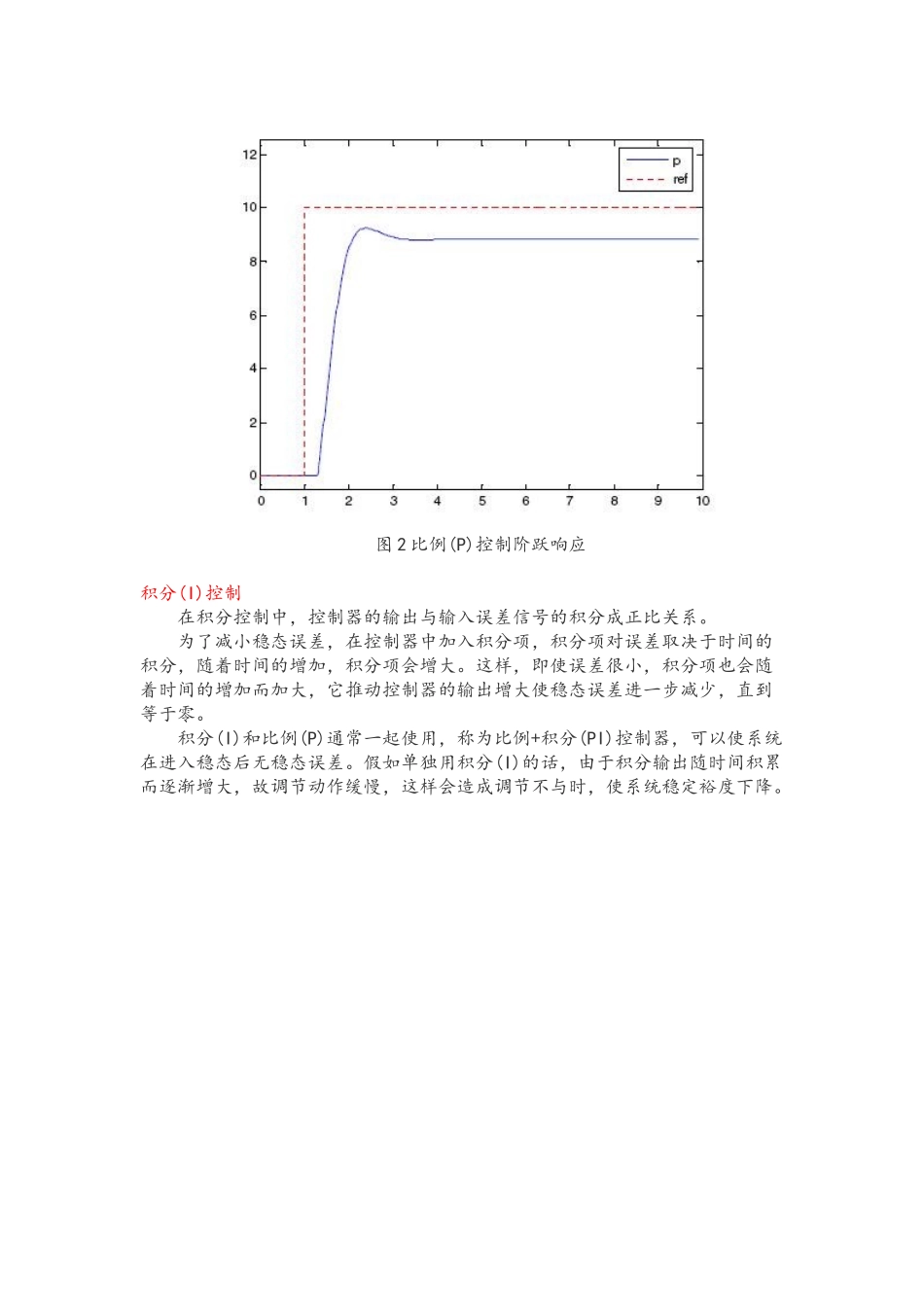
图 2 比例(P)控制阶跃响应积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系
为了减小稳态误差,在控制器中加入积分项,积分项对误差取决于时间的积分,随着时间的增加,积分项会增大
这样,即使误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减少,直到等于零
积分(I)和比例(P)通常一起使用,称为比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差
假如单独用积分(I)的话,由于积分输出随时间积累而