指北方位平台惯导系统导航解算报告:森学号:SY1217227手机:航空航天大学仪器科学与光电工程学院2024 年 10 月一 目的1熟悉指北方位平台惯导系统的工作原理;2根据加速度传感器输出的比力信息编写算法程序实现对东北方向速度与经纬度的解算;3 进一步掌握惯导的推导与解算技巧,为以后的学习打下基础
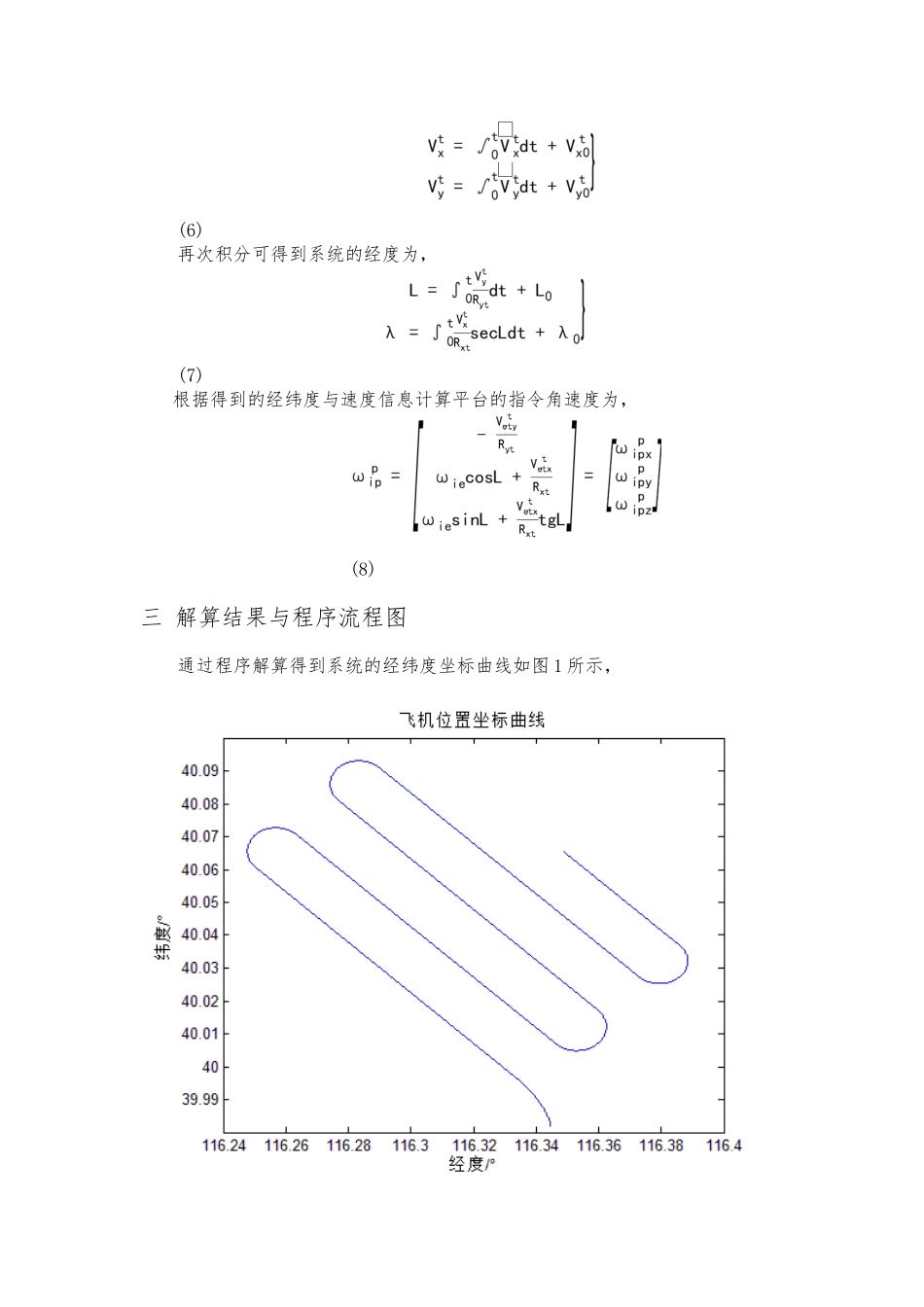
二 原理分析利用加速度传感器输出的比例信息求解系统加速度的原理如下所示,在指北方位系统中, (1)写成重量形式, (2)式中: (3) (4)在本次作业中,飞机的高度不发生改变,因此,则上式可改写为, (5)将上式分别作积分可得到飞机在东、北方向的速度为, (6)再次积分可得到系统的经度为, (7)根据得到的经纬度与速度信息计算平台的指令角速度为, (8)三 解算结果与程序流程图通过程序解算得到系统的经纬度坐标曲线如图 1 所示,图 1 系统的警卫度坐标曲线系统东、北方向的指令角速度与文件中的指令角速度误差曲线分别如图2、图 3 所示,图 2 飞机绕 x 轴方向指令角速度误差曲线图 3 飞机绕 y 轴方向指令角速度误差曲线通过程序解算的最终结果如表 1 所示,经纬度与东向、北向速度解算结果表 1项目数据纬度/°116
72经度/°40
6338东向速度(m/s)-63
0409北向速度(m/s)63
4300本次作业分别用 matlab 与 C 语言编程实现了对指北方位平台惯导系统速度、经纬度以与指令角速度的解算,其程序流程图如图 4 所示,图 4 解算程序流程图通过 C 语言解算的最终结果如图 5 所示图 5 C 语言解算结果四 学习小结通过程序解算,得到了飞机飞行的实际轨迹并计算了平台的指令角速度,更深刻的理解了指北方位惯导系统的工作原理与结算方法
本次结算中的积分运算采纳了前向切线逼近的方法,会存在一定的原理误差,为了减小原理误差,可分别采纳前向逼近和后向逼近再取平均的