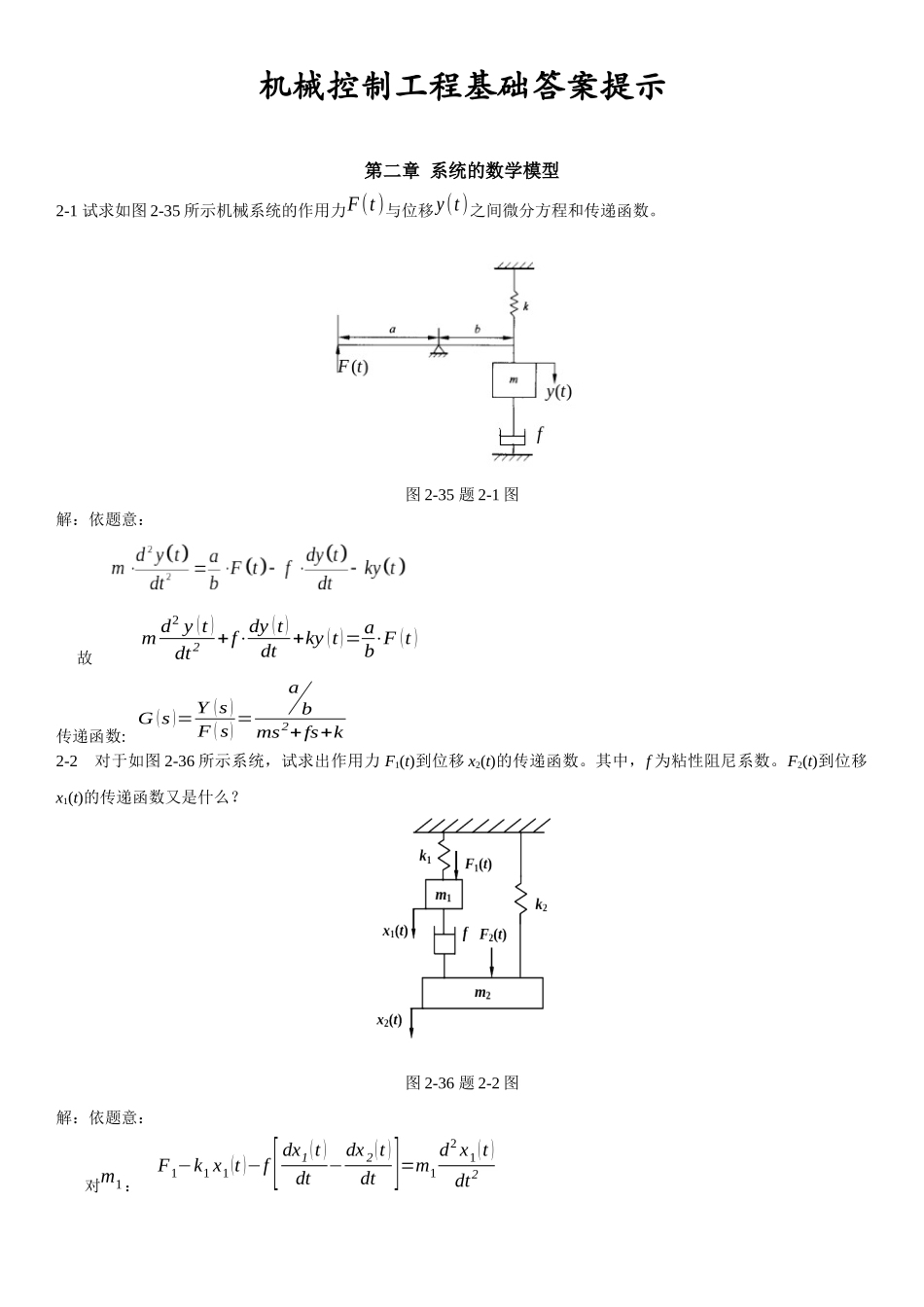
机械控制工程基础答案提示第二章 系统的数学模型2-1 试求如图 2-35 所示机械系统的作用力F(t )与位移y(t)之间微分方程和传递函数
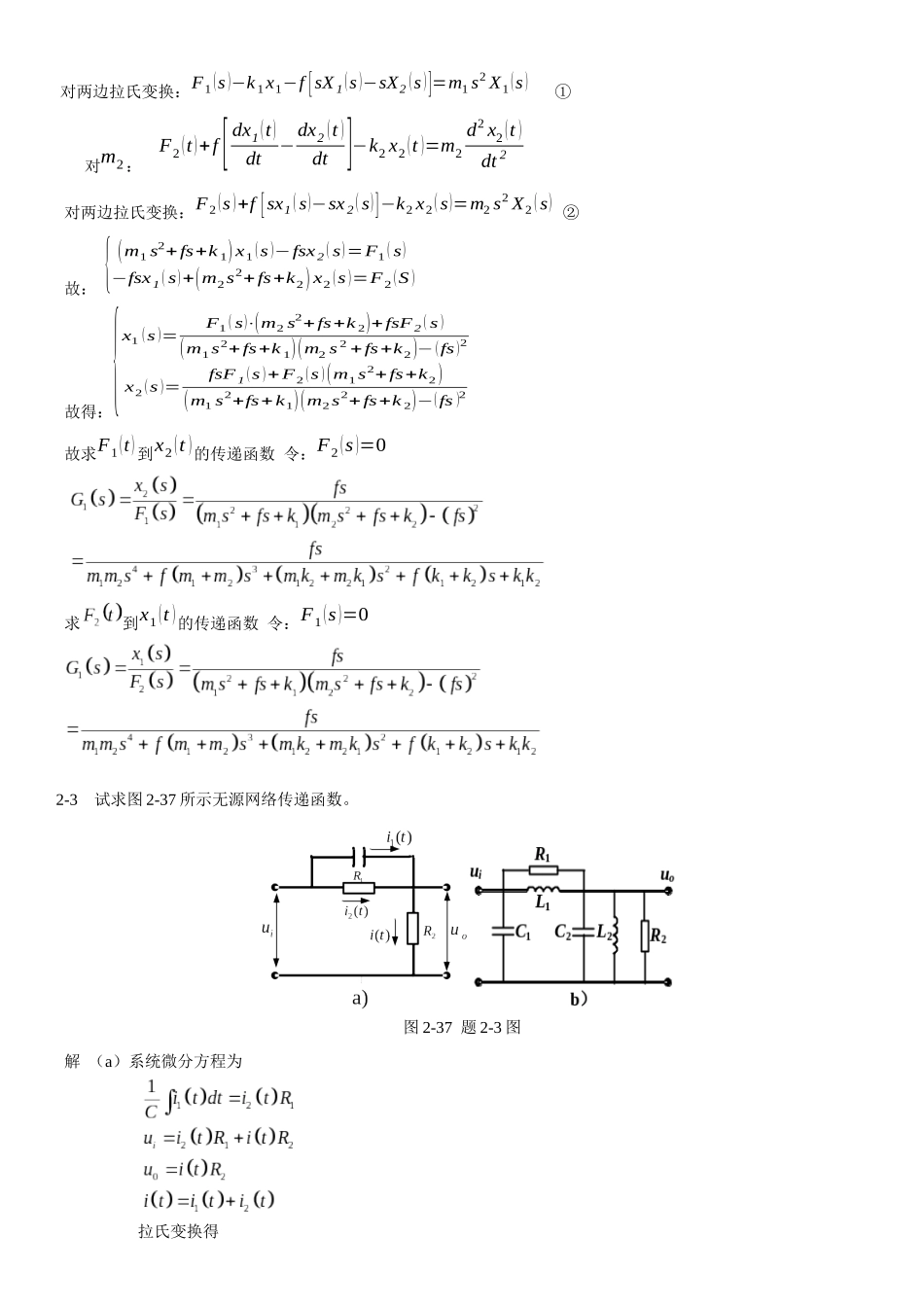
图 2-35 题 2-1 图解:依题意: 故 m d2 y (t )dt 2+f⋅dy (t)dt+ky (t)=ab⋅F (t )传递函数: G (s )= Y (s )F ( s) =abms2+fs+k2-2 对于如图 2-36 所示系统,试求出作用力 F1(t)到位移 x2(t)的传递函数
其中,f 为粘性阻尼系数
F2(t)到位移x1(t)的传递函数又是什么
图 2-36 题 2-2 图解:依题意: 对m1: F1−k1 x1(t )−f[dx1(t )dt−dx 2(t )dt ]=m1d2 x1(t )dt2 对两边拉氏变换:F1 (s )−k 1x1−f [sX 1 (s )−sX2 (s )]=m1 s2 X1 (s ) ① 对m2: F2(t)+f[dx1(t)dt−dx2 (t )dt ]−k2 x2 (t )=m2d2 x2(t )dt 2对两边拉氏变换:F2 (s )+f [sx1 ( s)−sx 2 ( s)]−k2 x2 ( s)=m2 s2 X2 ( s) ②故: {(m1 s2+fs+k 1) x1 (s )−fsx2 ( s)=F1 ( s)−fsx1 ( s)+(m2s2+fs+k2) x2 (s )=F2 (S ) 故得:{x1 (s )=F1 ( s)⋅(m2 s2+fs+k 2)+fsF 2 ( s )(m1s2+fs+k 1)(m2 s 2 +fs+k2)−(fs)2x2 (s )=fsF 1 (s )+F2 (s )(m1s2+fs+k2)(m1 s2+fs+k1)(m2s2+fs+k 2)−(fs )2故求F1(t) 到x2 (t )的传递函数 令:F2 (s )=0 求到x1 (t