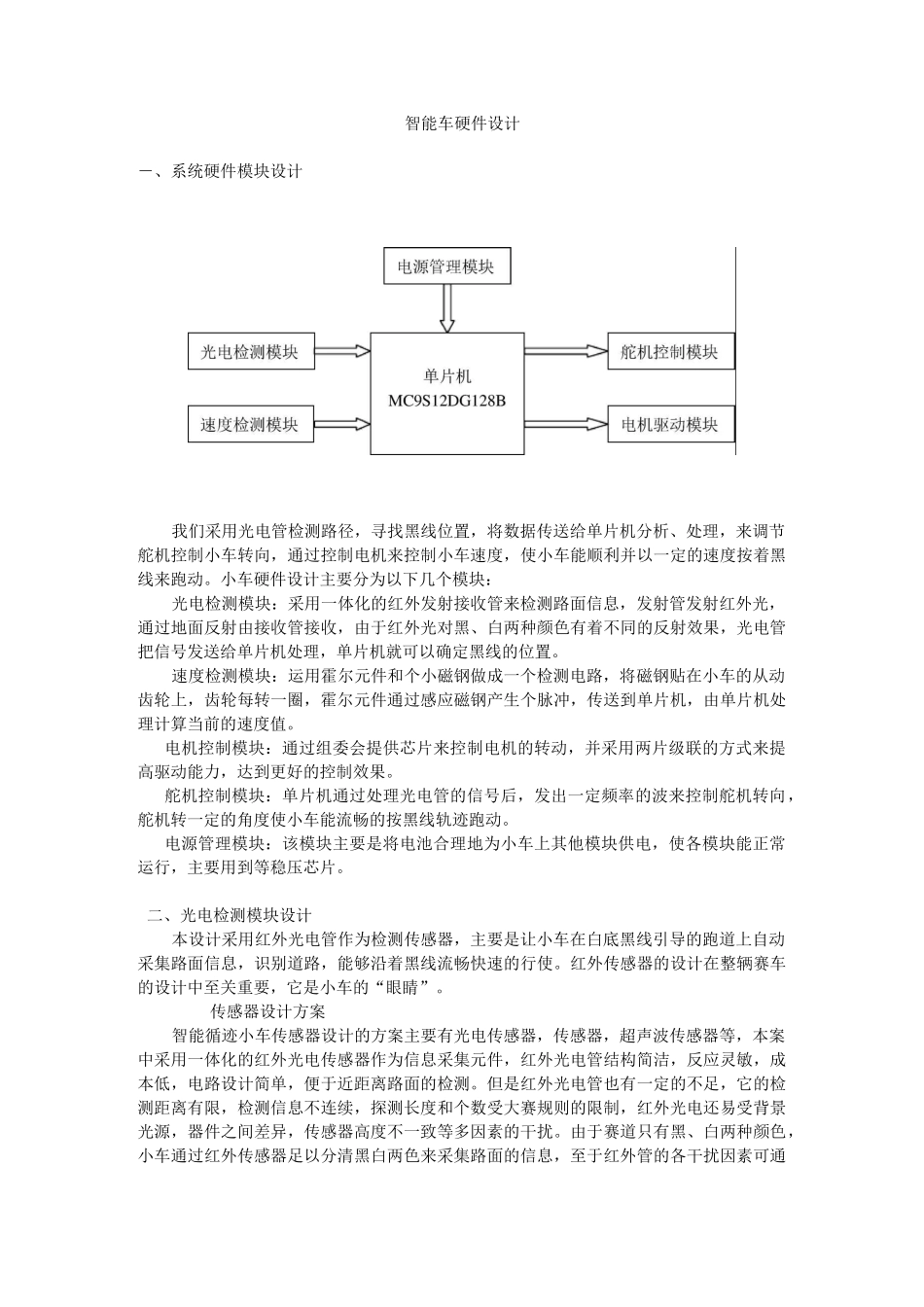
智能车硬件设计-、系统硬件模块设计我们采用光电管检测路径,寻找黑线位置,将数据传送给单片机分析、处理,来调节舵机控制小车转向,通过控制电机来控制小车速度,使小车能顺利并以一定的速度按着黑线来跑动
小车硬件设计主要分为以下几个模块:光电检测模块:采用一体化的红外发射接收管来检测路面信息,发射管发射红外光,通过地面反射由接收管接收,由于红外光对黑、白两种颜色有着不同的反射效果,光电管把信号发送给单片机处理,单片机就可以确定黑线的位置
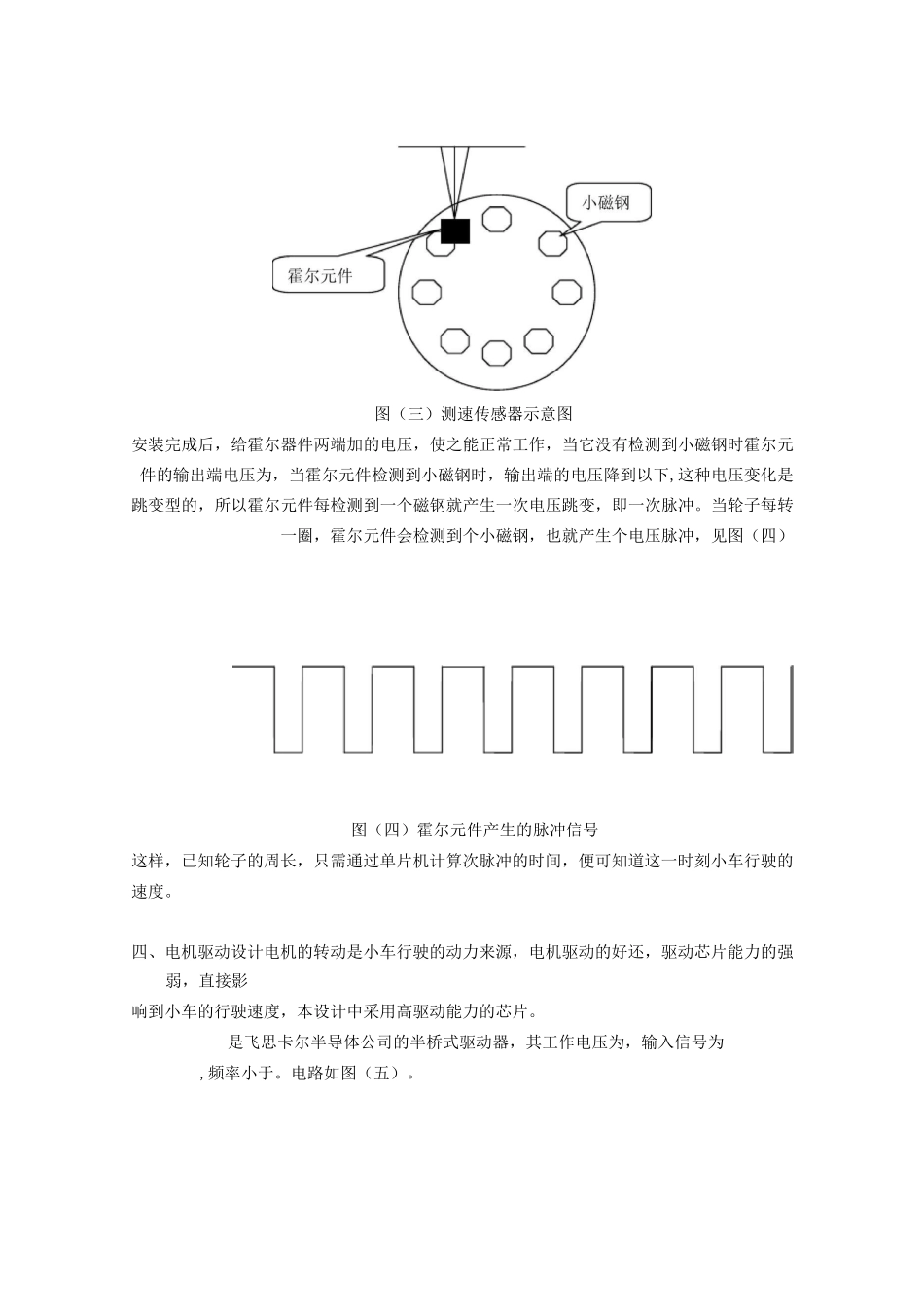
速度检测模块:运用霍尔元件和个小磁钢做成一个检测电路,将磁钢贴在小车的从动齿轮上,齿轮每转一圈,霍尔元件通过感应磁钢产生个脉冲,传送到单片机,由单片机处理计算当前的速度值
电机控制模块:通过组委会提供芯片来控制电机的转动,并采用两片级联的方式来提高驱动能力,达到更好的控制效果
舵机控制模块:单片机通过处理光电管的信号后,发出一定频率的波来控制舵机转向,舵机转一定的角度使小车能流畅的按黑线轨迹跑动
电源管理模块:该模块主要是将电池合理地为小车上其他模块供电,使各模块能正常运行,主要用到等稳压芯片
二、光电检测模块设计本设计采用红外光电管作为检测传感器,主要是让小车在白底黑线引导的跑道上自动采集路面信息,识别道路,能够沿着黑线流畅快速的行使
红外传感器的设计在整辆赛车的设计中至关重要,它是小车的“眼睛”
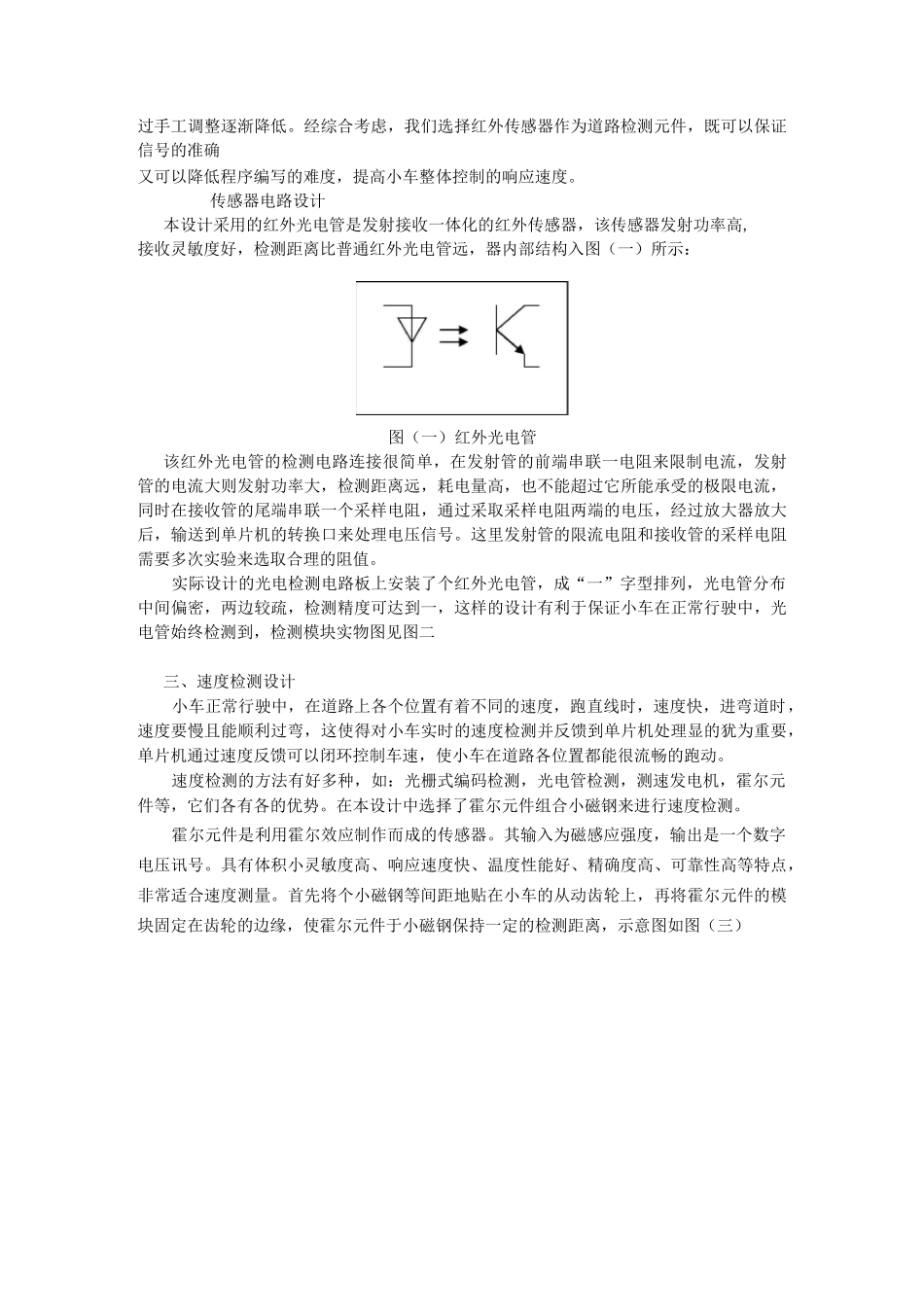
传感器设计方案智能循迹小车传感器设计的方案主要有光电传感器,传感器,超声波传感器等,本案中采用一体化的红外光电传感器作为信息采集元件,红外光电管结构简洁,反应灵敏,成本低,电路设计简单,便于近距离路面的检测
但是红外光电管也有一定的不足,它的检测距离有限,检测信息不连续,探测长度和个数受大赛规则的限制,红外光电还易受背景光源,器件之间差异,传感器高度不一致等多因素的干扰
由于赛道只有黑、白两种颜色,小车通过红外传感器足以分清黑白两色来采集路面的信息,至