1、当您付费下载文档后,您只拥有了使用权限,并不意味着购买了版权,文档只能用于自身使用,不得用于其他商业用途(如 [转卖]进行直接盈利或[编辑后售卖]进行间接盈利)。2、本站所有内容均由合作方或网友上传,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。3、如文档内容存在违规,或者侵犯商业秘密、侵犯著作权等,请点击“违规举报”。
碎片内容
{环境管理}课在仿真环境中走迷(一)宫讲义1.实时运行调试
运行时,依据实际运行情况,调整机器人参数,帮助用户快速实现 理想中的效果
2.自由灵活的机器人搭建与场地搭建
用户可自由选择机器人及其配件,进行机器人 搭建,可自行编辑 3D 训练竞赛场地,所想即所得
3.单人或多人的对抗过程
用户可添加多个机器人,自由组队进行队伍间对抗
4.与 NSTRobot 无缝连接
NSTRobot 生成的控制程序代码可有 NSTRSS 直接调用,大大节约编程时间
NSTRSS 带您进入全新的 3D 仿真世界,自由无限,创意无限
7,系统配置要求操作系统:win98,win2000 全系列,winXp,win2024server 运行环境:
NetFrameworkv1
1,DirectX9
0c最低硬件配置:600MHz 以上主频的 CPU,128M 内存,8M 显存以上的 3D 显卡
支持 1024×768 分辨率,16bit 颜色的监视器,声卡
推举配置:1G 以上主频的 CPU,256M 内存,64M 显存的 3D 显卡,支持 1024×768 分辨率,16bit 颜色,75Hz刷新率的监视器,声卡
3,打开 C:\PROGRAMFILE\NSTRSS\启动系统
其 C:\PROGRAMFILE\NSTRSS\下 MAP 目录存放场地背景图,而 ROBOT 目录下存放仿真机器人
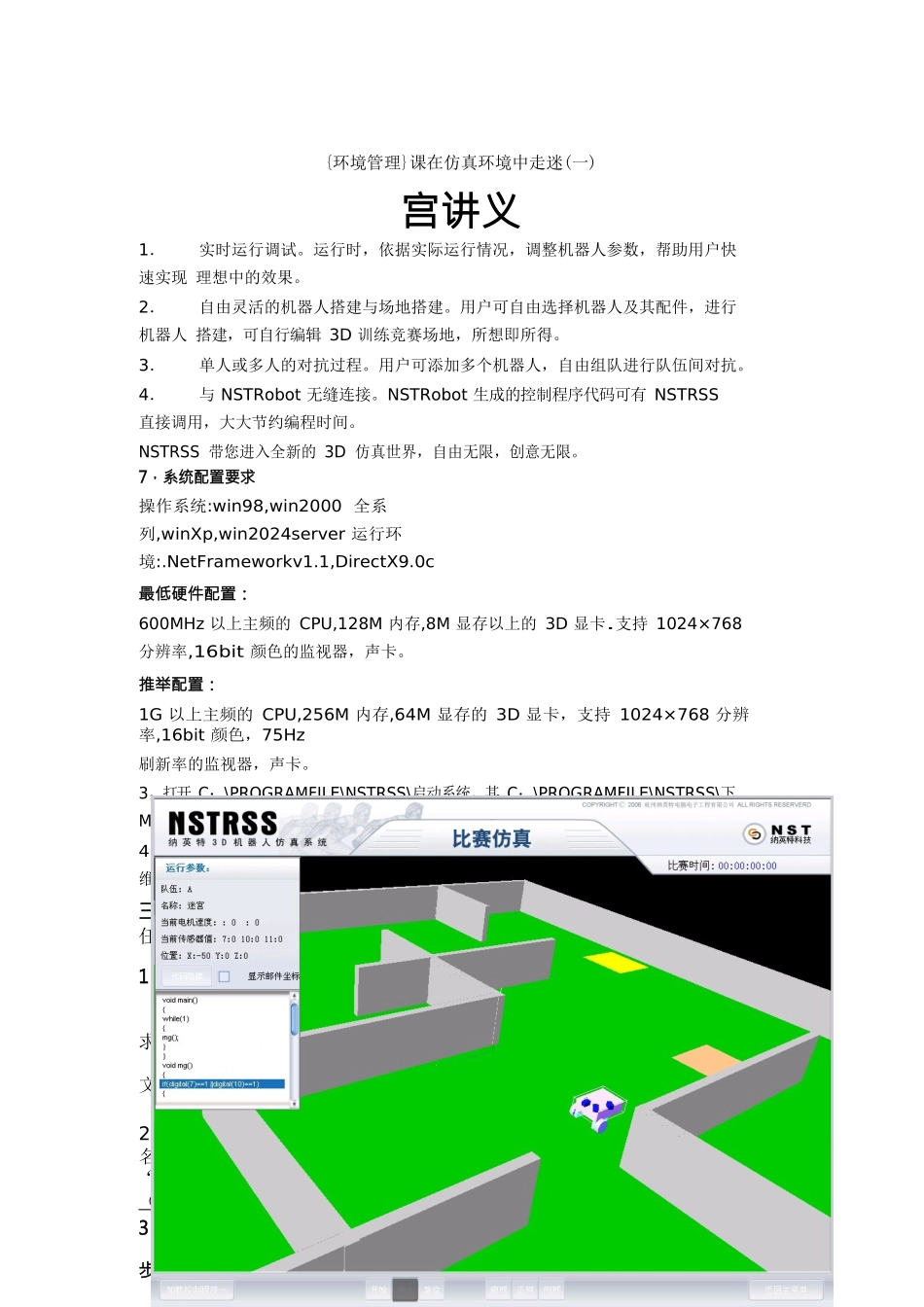
4,先睹为快
进入仿真系统,选择“快速启动”运行“机器人走迷宫”,感受一下三维立体空间中的机器人仿真运动
如下图所示:三、搭建仿真场地任务要求:画场地底图;导入场地图到仿真系统中;搭建场地实物1,画场地底图底图是搭建场地的依据,竞赛中一般对场地的大小、颜色等均作一定要求, 一定要按要求的大小(实际尺寸)作图
5M 的场地,文件的尺寸应为 250*150 像素
2, 实例画一个迷宫底图,
欢迎光临,大量办公文档供您挑选。