工 nai=jl=]jijijI-ai 丰 jij对于无向图,显然有 L=IL
(a,a),(a,a)(a,a),i,je[1,n]代表图中的路,1223ij路是由边构成的序列
2 基于 Mesh 网络通信结构的设计(2
1 多无人机编队通信方案设计1
1 基于图论的无人机通信问题描述如果将单个无人机看成节点,那么多无人机的行为可以利用图论进行描述,无人机之间的信息交流可以表示为拓扑图形式[40]
假设编队中共有 n 架无人机,则图中的边可以表示为无人机之间的通信联系,定义无人机编队的通信连结图为 G(V,E,A),式中,V=化,v2,,v}代表具有 n 架无人机节点的集合,E={(v,v)eVxV,i 丰 j}代表边的12nij集合,A=[a]代表邻接矩阵,a 代表节点 i 到 j 的权值系数
容易推出 a
=0,并且ijnxnjita=a'0
定义 e=(v,v)eVxV,i 丰 j,若存在 eoe,则该图为无向图
定义某 ijjijiJij力节点 v的邻居集 N={aeV,(a,a)eE}o图 G(V,E,A 丿的 Laplacian 矩阵为 L=[l]
iijijJnxnl的值如式(2
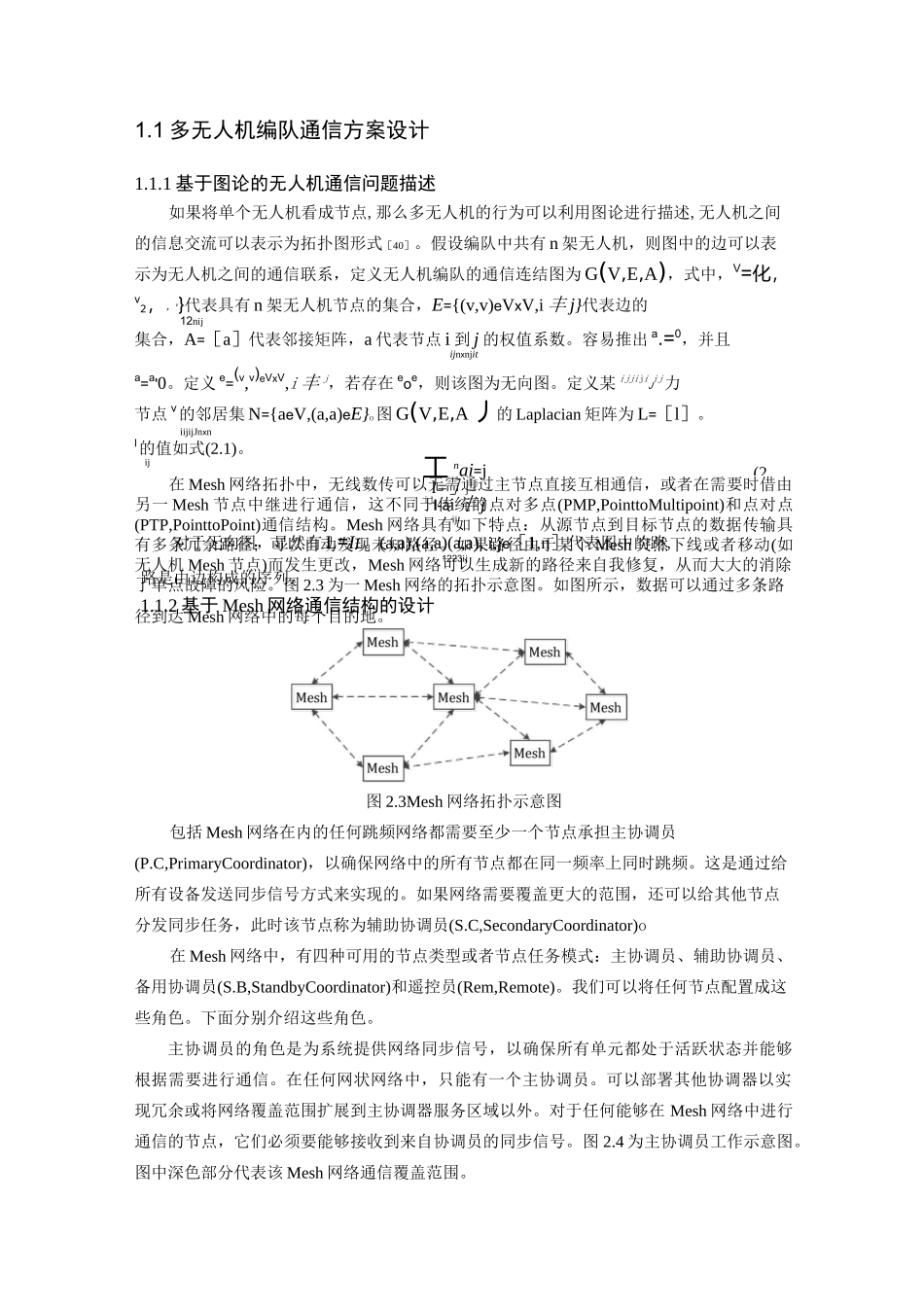
ij在 Mesh 网络拓扑中,无线数传可以无需通过主节点直接互相通信,或者在需要时借由另一 Mesh 节点中继进行通信,这不同于传统的点对多点(PMP,PointtoMultipoint)和点对点(PTP,PointtoPoint)通信结构
Mesh 网络具有如下特点:从源节点到目标节点的数据传输具有多条冗余路径;可以自动发现未知路径
如果路径由于某个 Mesh 突然下线或者移动(如无人机 Mesh 节点)而发生更改,Mesh 网络可以生成新的路径来自我修复,从而大大的消除了单点故障的风险
3 为一 Mesh 网络的拓扑示意图
如图所示,数据可