*FouneirIrarrs-fom毫米波雷达测速原理(77GHzFMCW)本章摘要:介绍调频连续波(FMCW),如何进行测速,测速范围,测速分辨率如何计算一、傅里叶变换对时域信号进行傅里叶变换,不仅可以得到信号的频率特征,例如下面峰值处对应的值,还可以得到对应频率处复平面内,相应的相位角,此相位角对应于起始位置处角度
FourierTransforms : Aquickreview 那么根据上面的性质,两个信号频率相同,只是起始位置不同,傅里叶变换依然可以区分出来相位角
FourierT 畑nsforms:Aquickreview■FourierTransforinconvertssatimedtomain 两 n 甘 Iintothefrequencydornain
■Asinusoidinlh&timsdomainproducesiapeakinthefr^quenc^domain
IngE>neralethesignalinths*†FrequencydomainisCDrnptex(i
eeachvalueisaphasorwilhaamplitudeandaphase)Phaseof 谄总
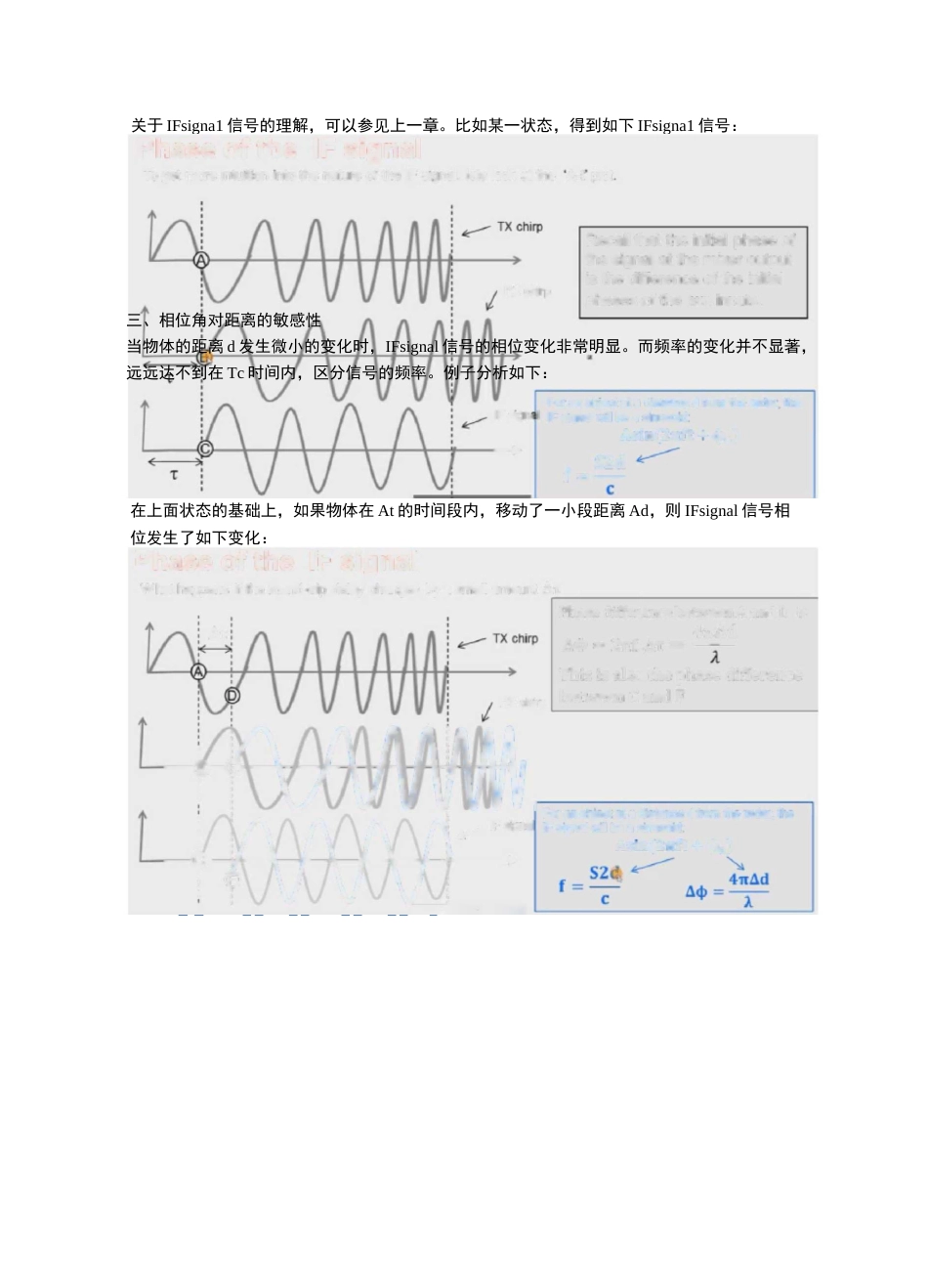
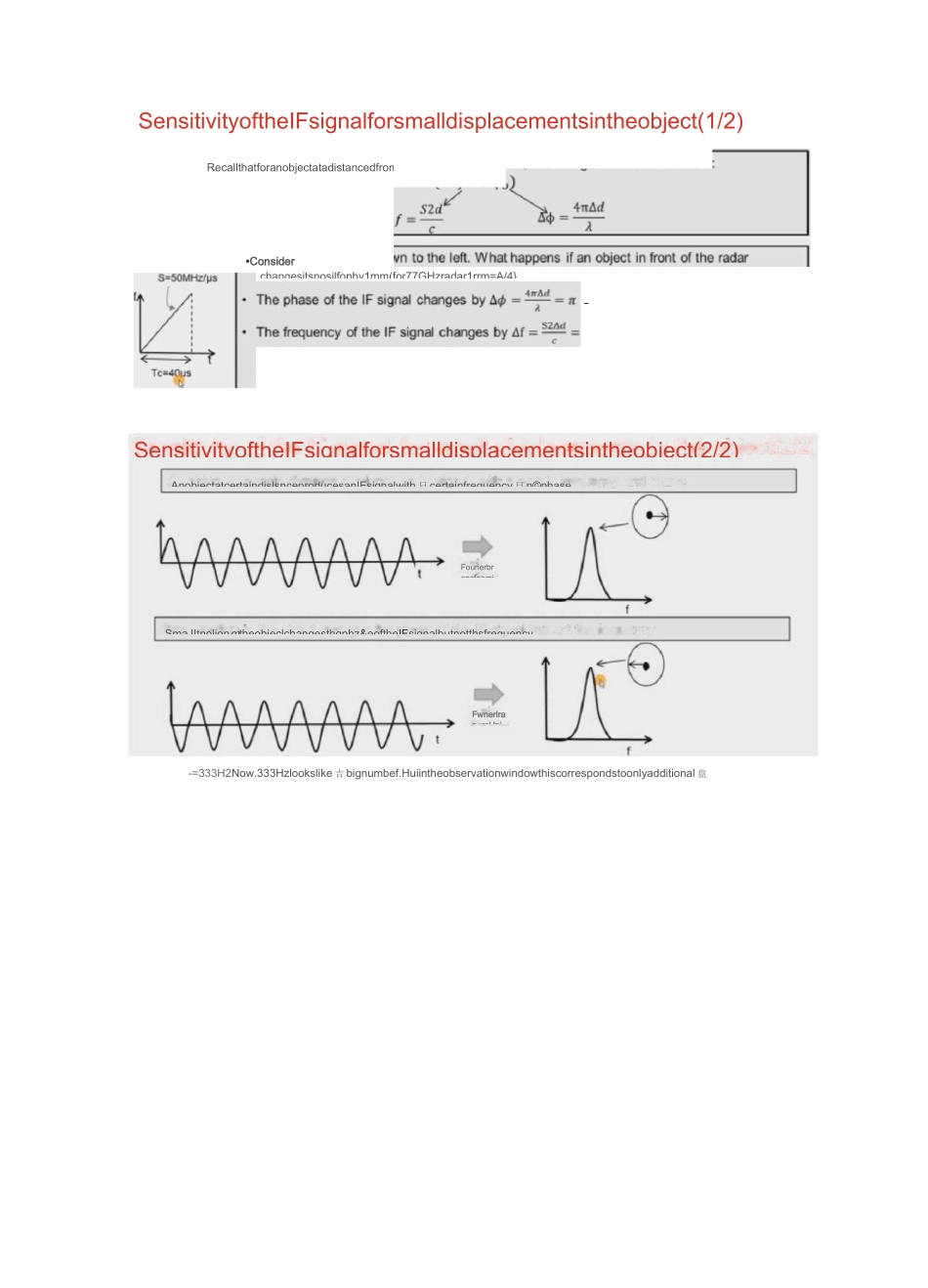
oeak 也总 quaitotheinitial 制 laeeofthesinus 曲 d PhawrcormpOrdlngiIQthepeak二、IFsignal 信号的相位角*FourierTrarisformconvertsatimsdomainsignalintothefrequencydomain
† AsinusoidinThelimedomainproducesapeakinthefrequencydomain
Ingeneral,theaiQnalintheFrequenc/Uomainiscomplex(i
eachvalueiBapbasorwith