YAMAHA 手持编程器操作说明手持器的操作主要可以分为四个部分:1
急停停止的复归;2
原点复归;3
交导点坐标;4
急停停止的复归由于某种原因,欲使正在动作的机器人紧急停止时,按住 MPB 上的紧急停止按钮
控制器在紧急停止按钮被按下的瞬间,停止对机器人的电源供电
紧急停止的复归就是从紧急停止状态返回到普通操作的状态
复归的步骤如下:Stepl 解除 MPB 的紧急停止按钮
紧急停止是将被按下的按钮,按顺时针方向旋转后被解除
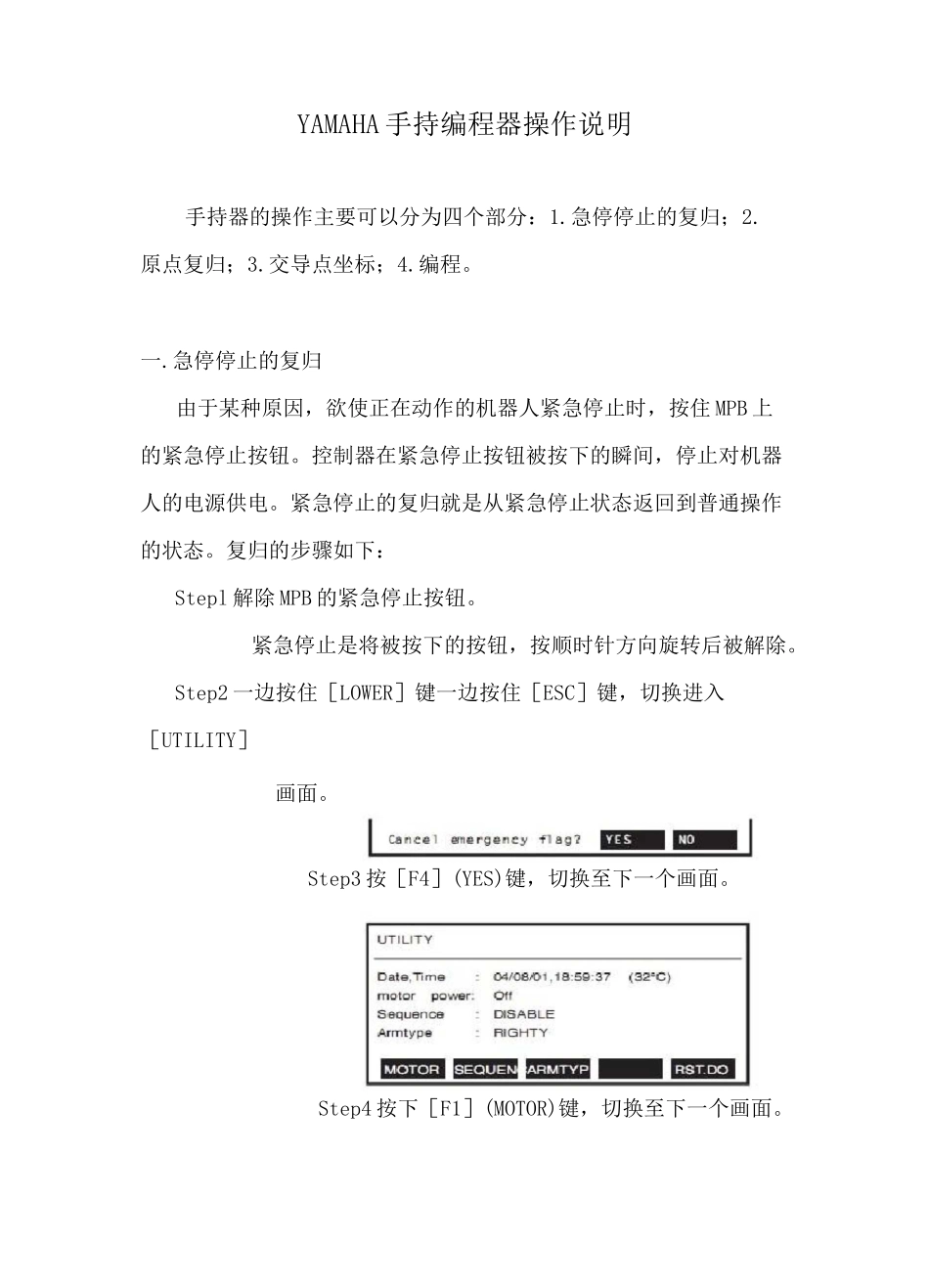
Step2 一边按住[LOWER]键一边按住[ESC]键,切换进入[UTILITY]画面
Step3 按[F4](YES)键,切换至下一个画面
Step4 按下[F1](MOTOR)键,切换至下一个画面
LFTILLTY
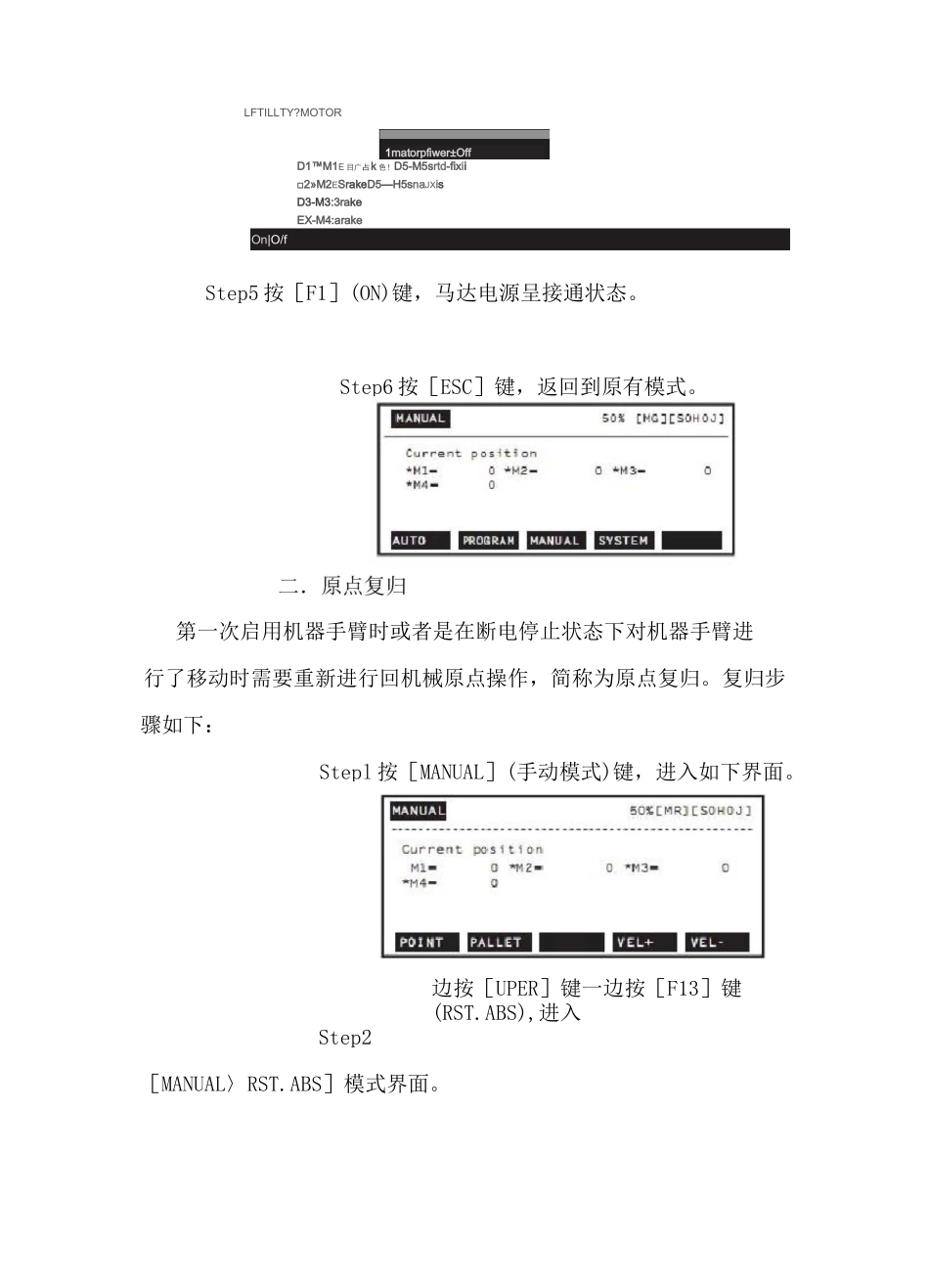
MOTOR1matorpfiwer±OffD1™M1E 目广占k 色
D5-M5srtd-fixii□2»M2ESrakeD5—H5snaJXisD3-M3:3rakeEX-M4:arakeOn|O/fStep5 按[F1](ON)键,马达电源呈接通状态
Step6 按[ESC]键,返回到原有模式
第一次启用机器手臂时或者是在断电停止状态下对机器手臂进行了移动时需要重新进行回机械原点操作,简称为原点复归
复归步骤如下:Stepl 按[MANUAL](手动模式)键,进入如下界面
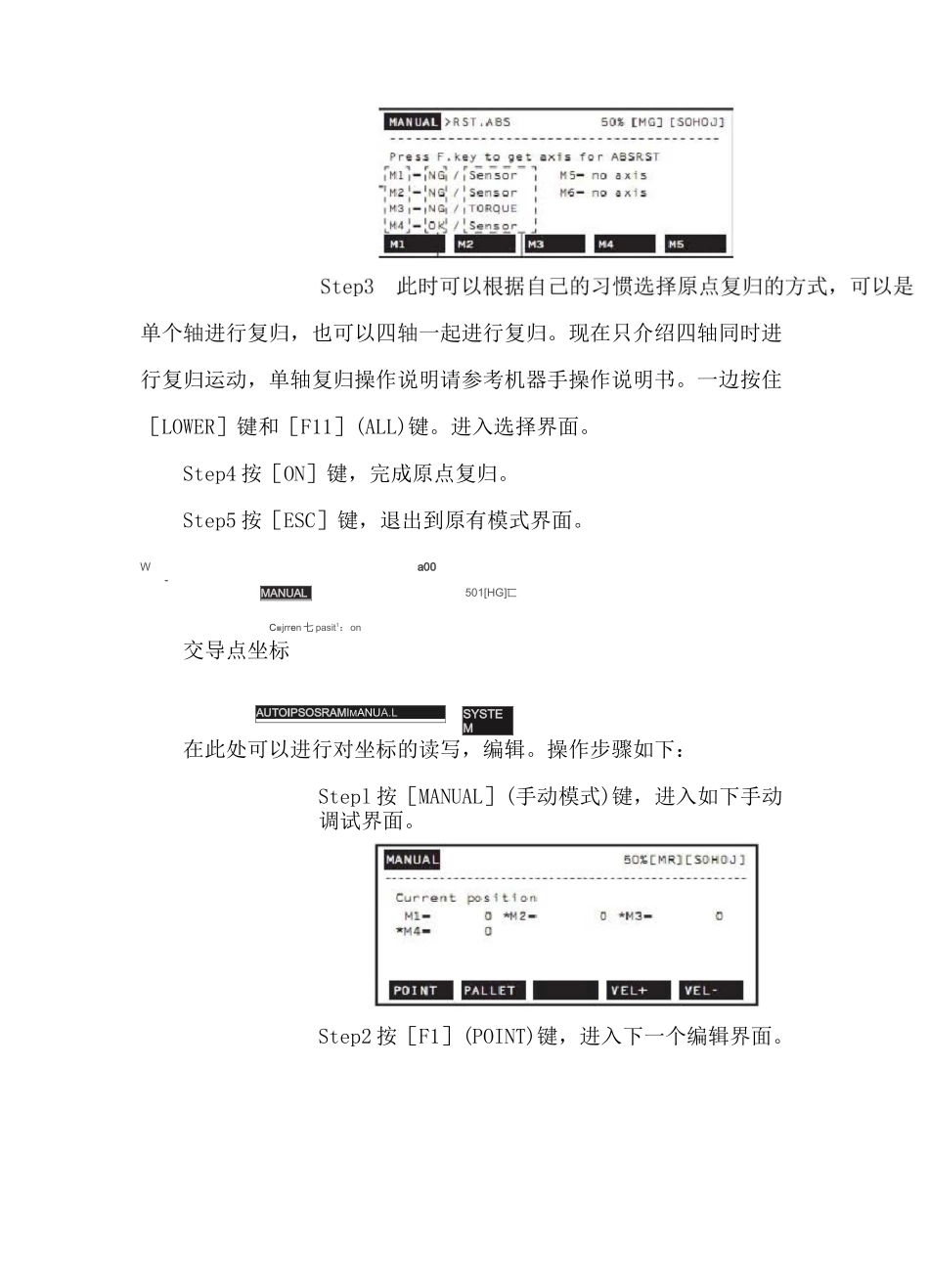
边按[UPER]键一边按[F13]键(RST
ABS),进入Step2[MANUAL〉RST
ABS]模式界面
单个轴进行复归,也可以四轴一起进行复归
现在只介绍四轴同时进行复归运动,单轴复归操作说明请参考机器手操作说明书
一边按住[LOWER]键和[F11](ALL)键
进入选择界面
Step4 按[ON]键,完成原点复归
Step5 按[ESC]键,退出到原有模式界面
W-a00交导点坐标在此处可以进行对坐标的读写,编辑
操作步骤如下:Step