1 基本概念构件:运动单元体零件:制造单元体 构件可由一种或几种零件构成
•构件:由一种或几种零件构成的没有相对运动的刚性系统
机器或机构中最小的运动单元
•零件:机器或机构中最小的制造单元
• 例如:曲轴——单一零件
• 连杆——多种零件的刚性组合体
•注意:构件与零件联络与区别
一、机构的构成机架:机构中相对不动的构件原动件:驱动力(或力矩)所作用的构件
→输入构件从动件:伴随原动构件的运动而运动的构件
→输出构件在任何一种机构中,只能有一种构件作为机架
在活动构件中至少有一种构件为原动件,其他的活动构件都是从动件
二、自由度、约束自由度:构件具有独立运动参数的数目(相对于参照系)在平面内作自由运动的构件具有 3 个自由度;在三维空间作自由运动的构件具有 6 个自由度
约 束:运动副对构件间相对运动的限制作用对构件施加的约束个数等于其自由度减少的个数
三、运动副使两构件直接接触并能产生一定相对运动的连接成为运动副
运动副的作用是约束构件的自由度
四、运动副类型及其代表符号1
低副——两构件以面接触而形成的运动副
转动副:两构件只能在一种平面内作相对转动,又称作铰链
自由度数 1,只能转动; 约束数 2,失去了沿 X、Y 方向的移动
移动副:两构件只能沿某一轴线作相对移动
自由度数 1,只能 X 方向移动; 约束数 2,失去 Y 方向移动和转动
高副——两构件以点或线接触而构成的运动副
自由度数 2,保持切线方向的移动和转动约束数 1,失去法线方向的移动
五、运动链运动链:若干个构件通过运动副联接而成的互相间可作相对运动的系统
闭式运动链简称闭链:运动链的各构件首尾封闭开式运动链简称开链:未构成首尾封闭的系统§2
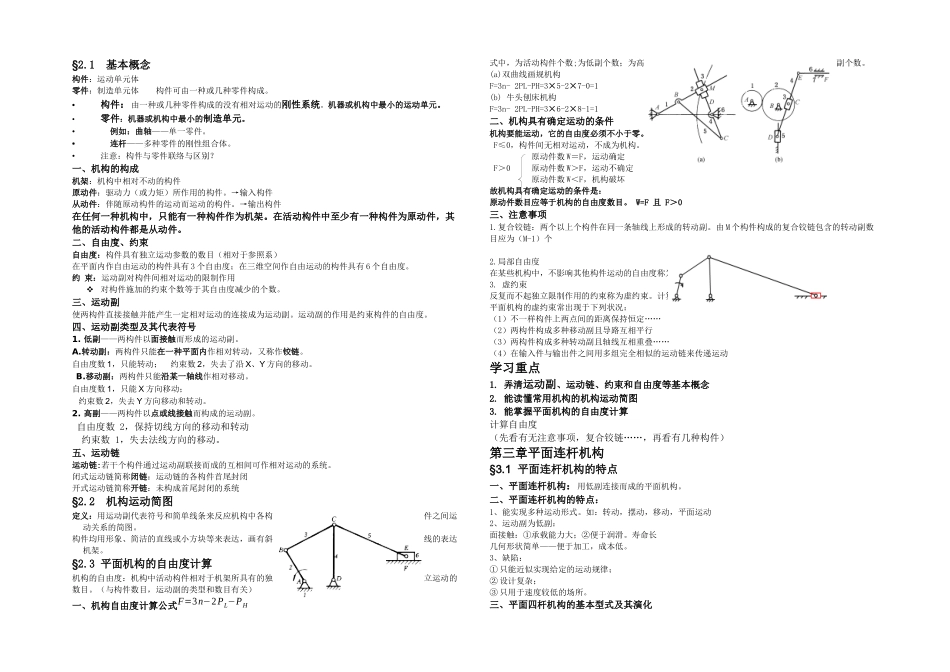
2 机构运动简图定义:用运动副代表符号和简单线条来反应机构中各构件之间运动关系的简图
构件均用形象、简洁的直线或小方块等来表达,画有斜线