第 1 章 平面机构得结构分析1、1 解释下列概念 1、运动副;2、机构自由度;3、机构运动简图;4、机构结构分析;5、高副低代
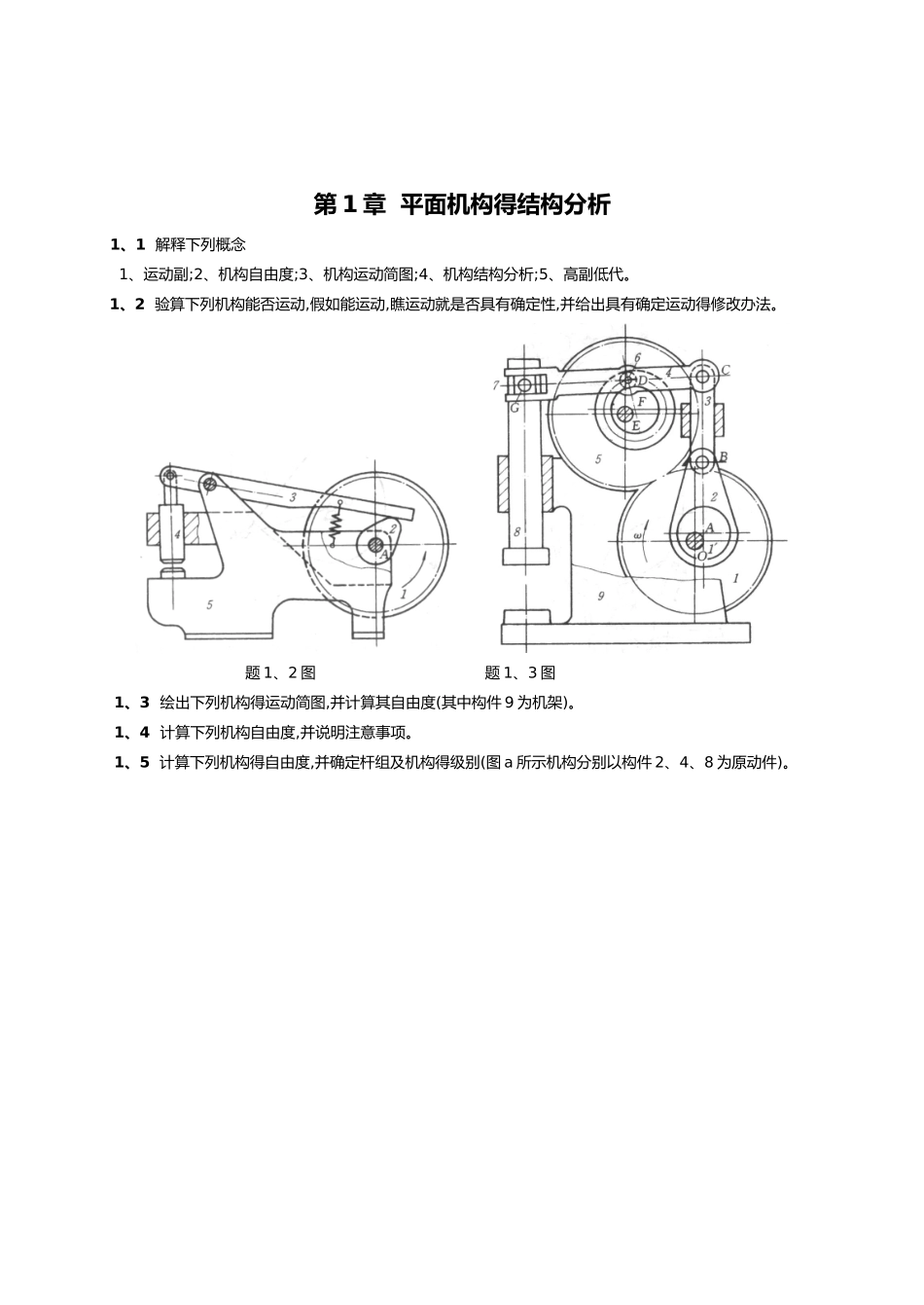
1、2 验算下列机构能否运动,假如能运动,瞧运动就是否具有确定性,并给出具有确定运动得修改办法
题 1、2 图 题 1、3 图 1、3 绘出下列机构得运动简图,并计算其自由度(其中构件 9 为机架)
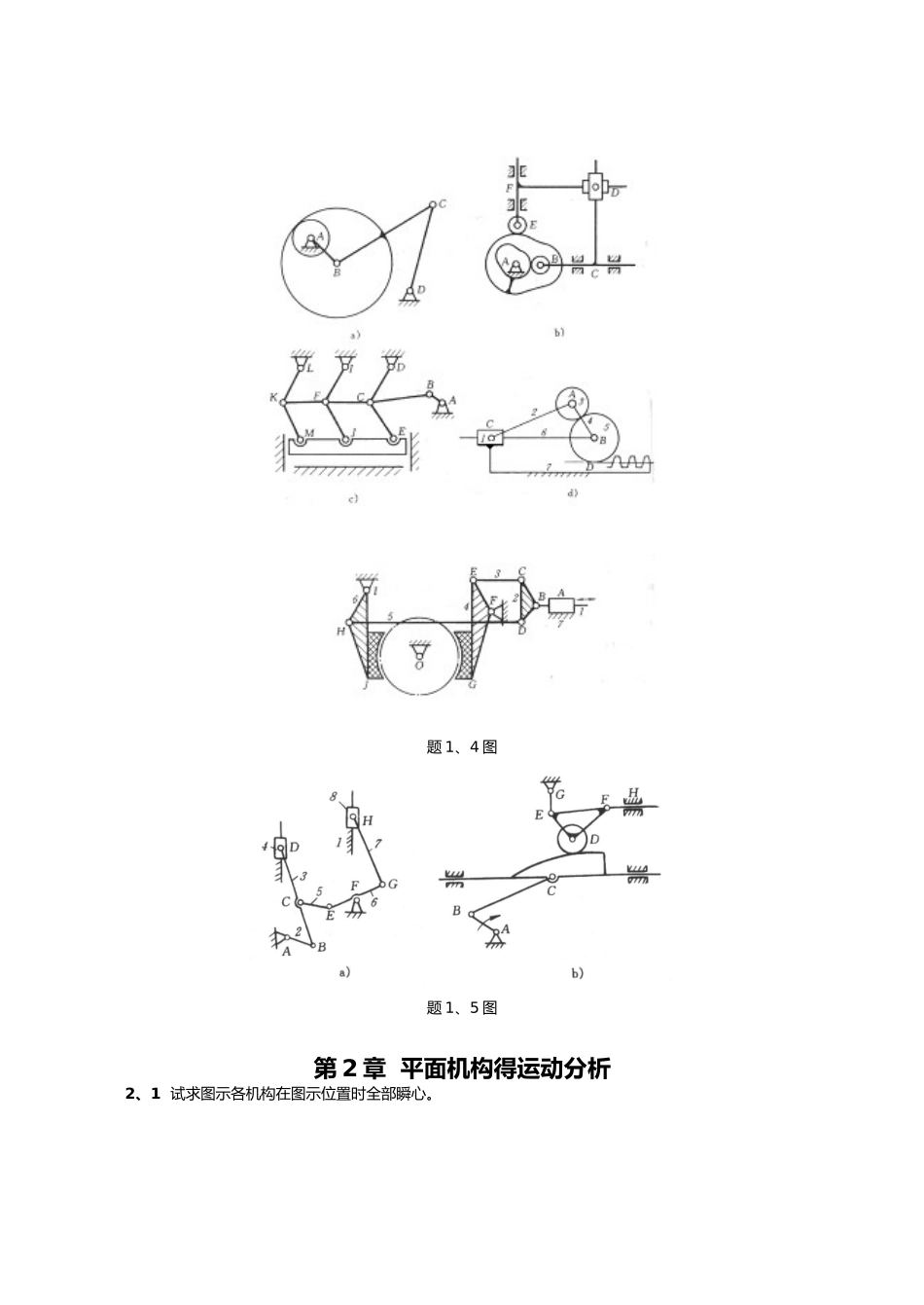
1、4 计算下列机构自由度,并说明注意事项
1、5 计算下列机构得自由度,并确定杆组及机构得级别(图 a 所示机构分别以构件 2、4、8 为原动件)
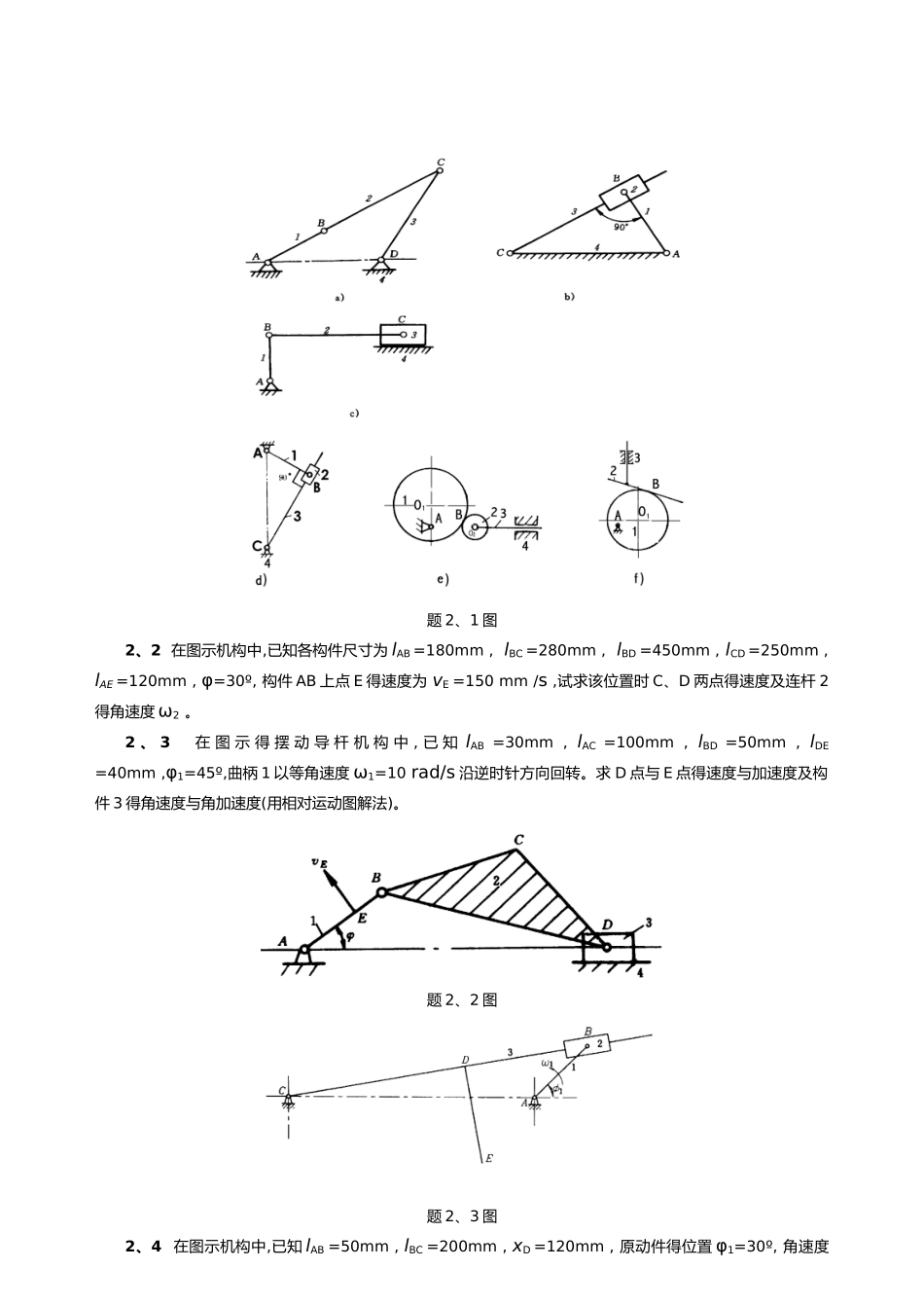
题 1、4 图题 1、5 图 第 2 章 平面机构得运动分析2、1 试求图示各机构在图示位置时全部瞬心
题 2、1 图2、2 在图示机构中,已知各构件尺寸为 lAB =180mm , lBC =280mm , lBD =450mm , lCD =250mm , lAE =120mm , φ=30º, 构件 AB 上点 E 得速度为 vE =150 mm /s ,试求该位置时 C、D 两点得速度及连杆 2得角速度 ω2
2 、 3 在 图 示 得 摆 动 导 杆 机 构 中 , 已 知 lAB =30mm , lAC =100mm , lBD =50mm , lDE =40mm ,φ1=45º,曲柄 1 以等角速度 ω1=10 rad/s 沿逆时针方向回转
求 D 点与 E 点得速度与加速度及构件 3 得角速度与角加速度(用相对运动图解法)
题 2、2 图题 2、3 图2、4 在图示机构中,已知 lAB =50mm , lBC =200mm , xD =120mm , 原动件得位置 φ1=30º, 角速度ω1=10 rad/s ,角加速度 α1=0,试求机构在该位置时构件 5 得速度与加速度,以及构件 2 得角速度与角加速度
题 2、4 图2、5 图示为机构得运动简图及相应得速度图与加速度图