ABB 机器人外部启动配置说明一、外部I O 板得配置ABB 标准I/O 板D SQ C 652 就是最为常用得模块,下面以创建数字输入信号 DI,数字输出信号 DO,组输入信号 GI,组输出信号 GO 为例做一个详细得讲解
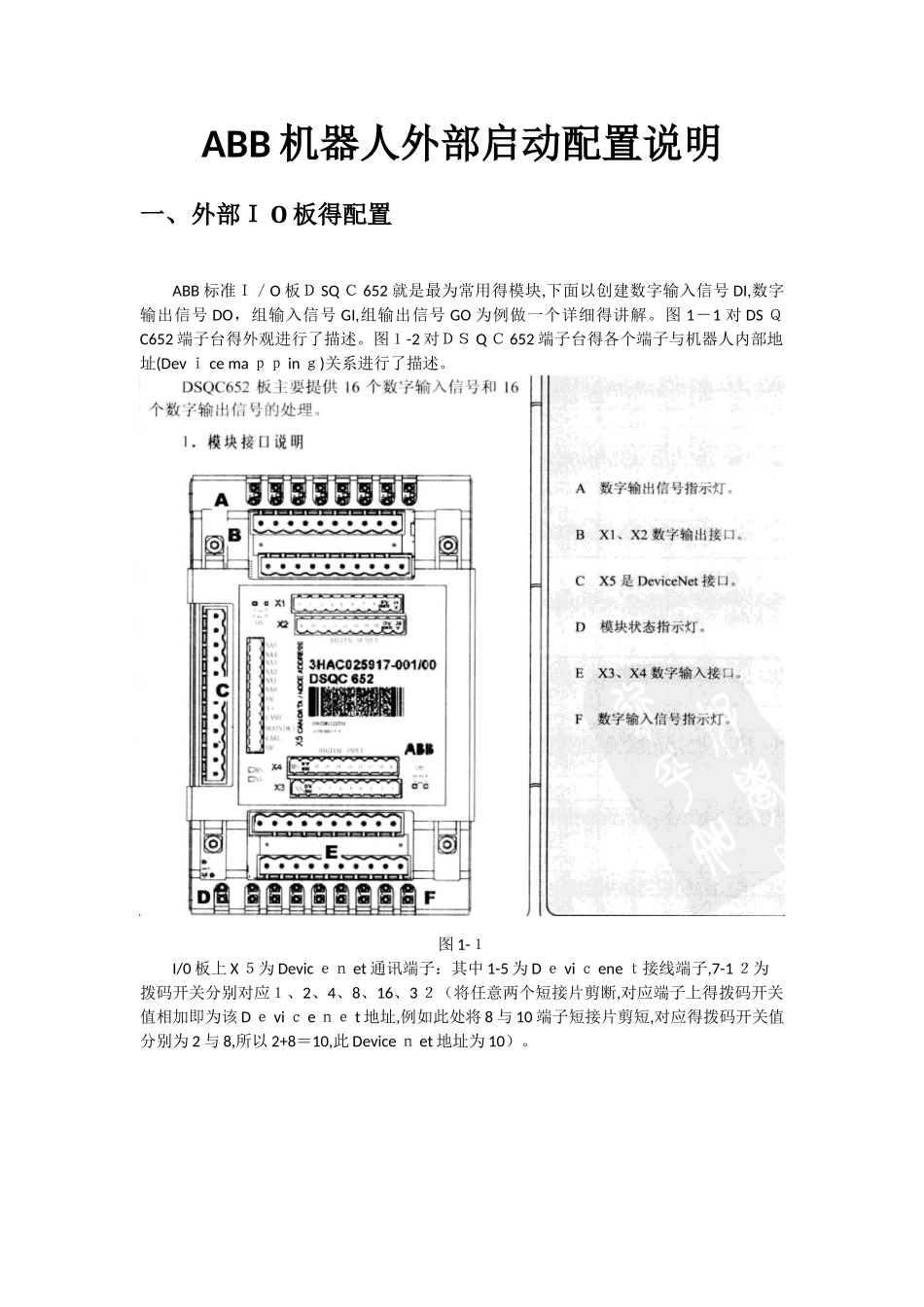
图 1-1 对 DS QC652 端子台得外观进行了描述
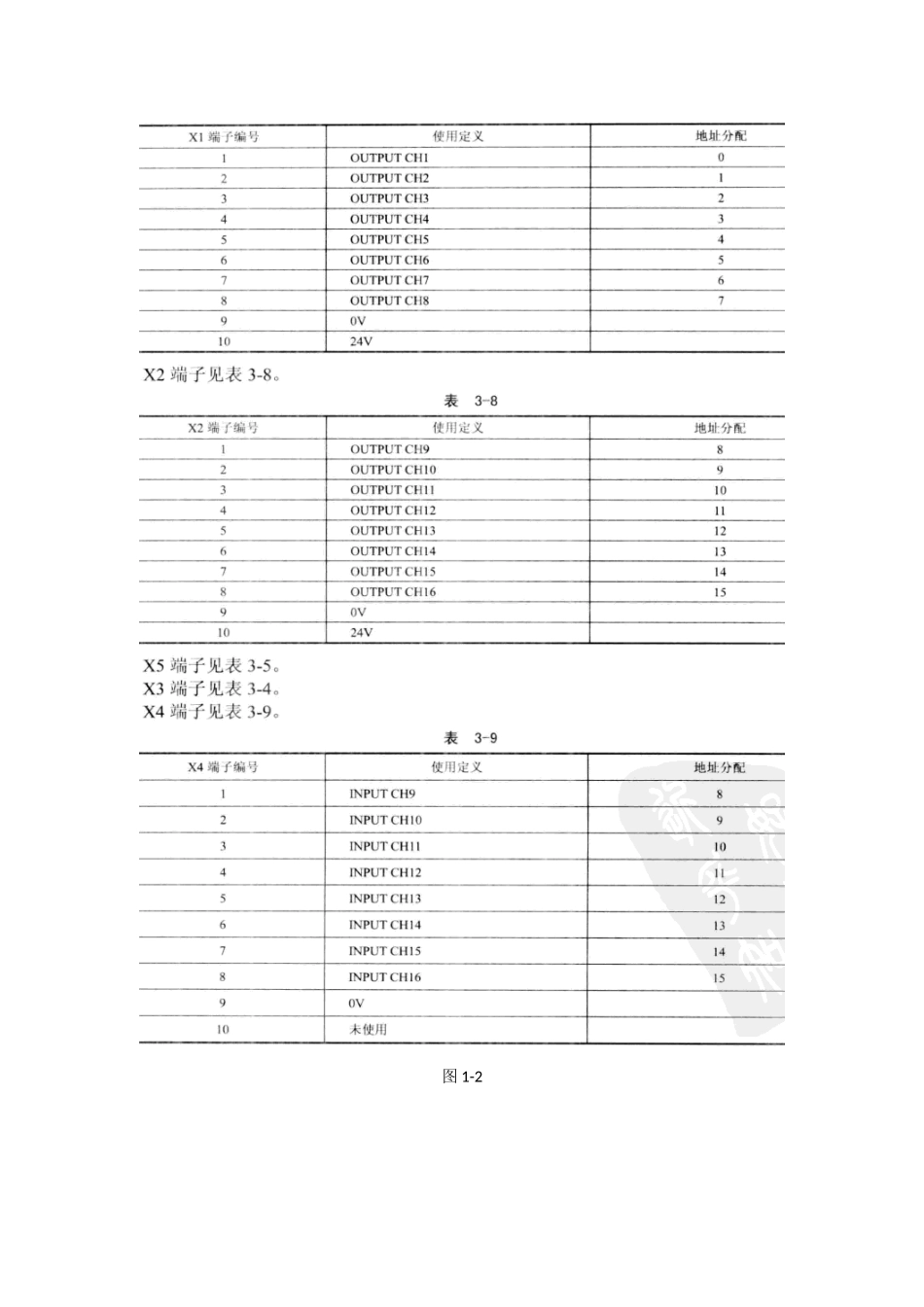
图1-2 对DS Q C 652 端子台得各个端子与机器人内部地址(Dev i ce ma pp in g)关系进行了描述
图 1-1I/0 板上 X 5为 Devic en et 通讯端子:其中 1-5 为 D e vi c ene t接线端子,7-1 2为拨码开关分别对应1、2、4、8、16、3 2(将任意两个短接片剪断,对应端子上得拨码开关值相加即为该 D e vi c e ne t 地址,例如此处将 8 与 10 端子短接片剪短,对应得拨码开关值分别为 2 与 8,所以 2+8=10,此 Device n et 地址为 10)
图 1-21、定义 DSQ C 652 板得总线连接ABB 标准I/O板都就是下挂在Devic eNe t现场总线下得设备,通过 X5 端口与 De viceNet 现场总线进行通讯
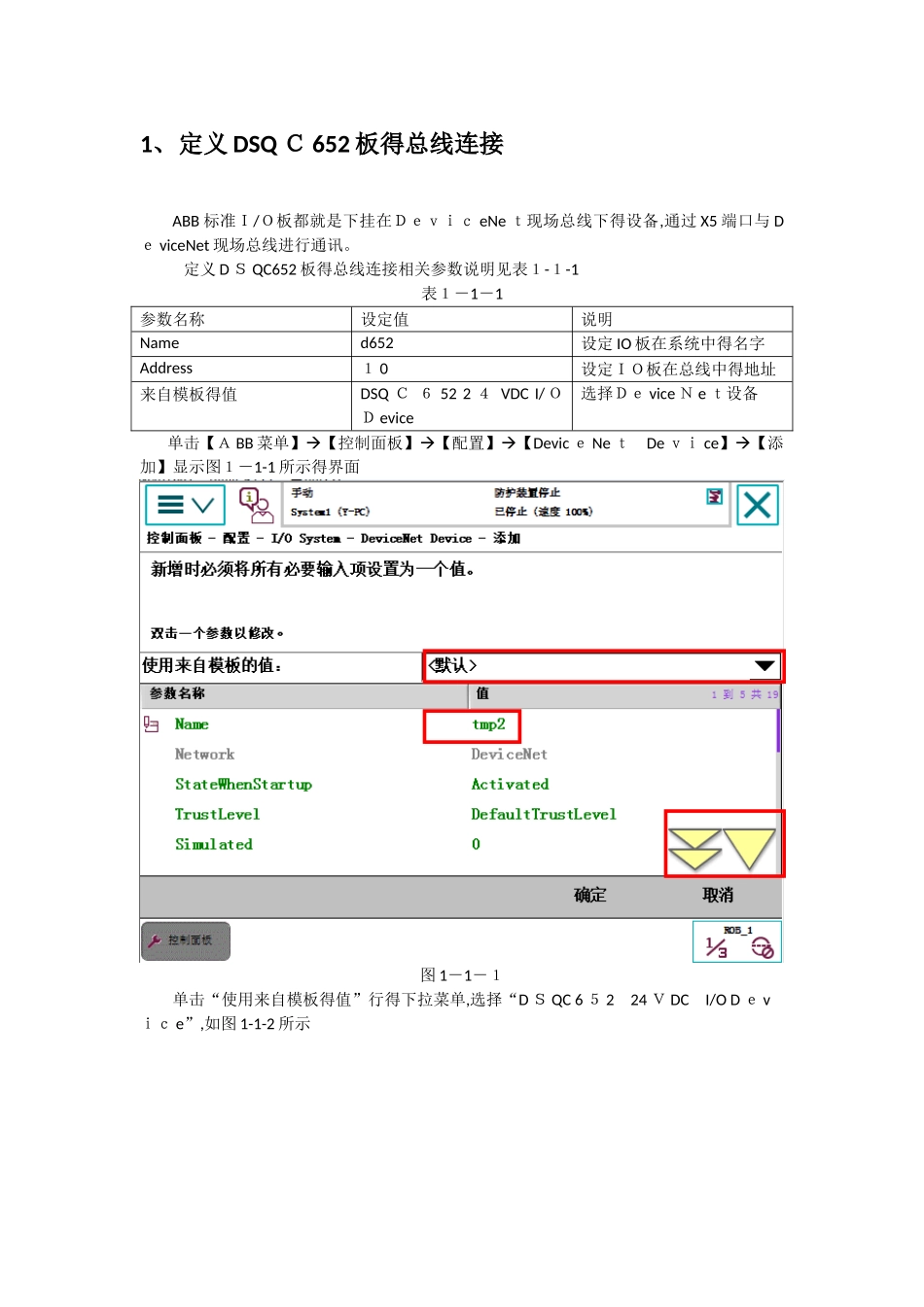
定义 D S QC652 板得总线连接相关参数说明见表1-1-1表1-1-1参数名称设定值说明Named652设定 IO 板在系统中得名字Address1 0设定IO板在总线中得地址来自模板得值DSQ C 6 52 2 4 VDC I/O D evice选择De vice N e t设备 单击【A BB 菜单】【控制面板】【配置】【Devic e Ne t De vi ce】【添加】显示图1-1-1 所示得界面图 1-1-1单击“使用来自模板得值”行得下拉菜单,选择“D S QC 6 5 2 24 V DC I/O D e vic e”,如图 1-1-2 所示图 1-1-2