根据系统希望技术指标计算出的控制器 PID 参数如下表:项目PID 控制器参数俯仰轴Kep1
5064Ked0
7196横侧轴Kpp0
3083Kpd0
0982旋转轴Krp0
8236Kri0
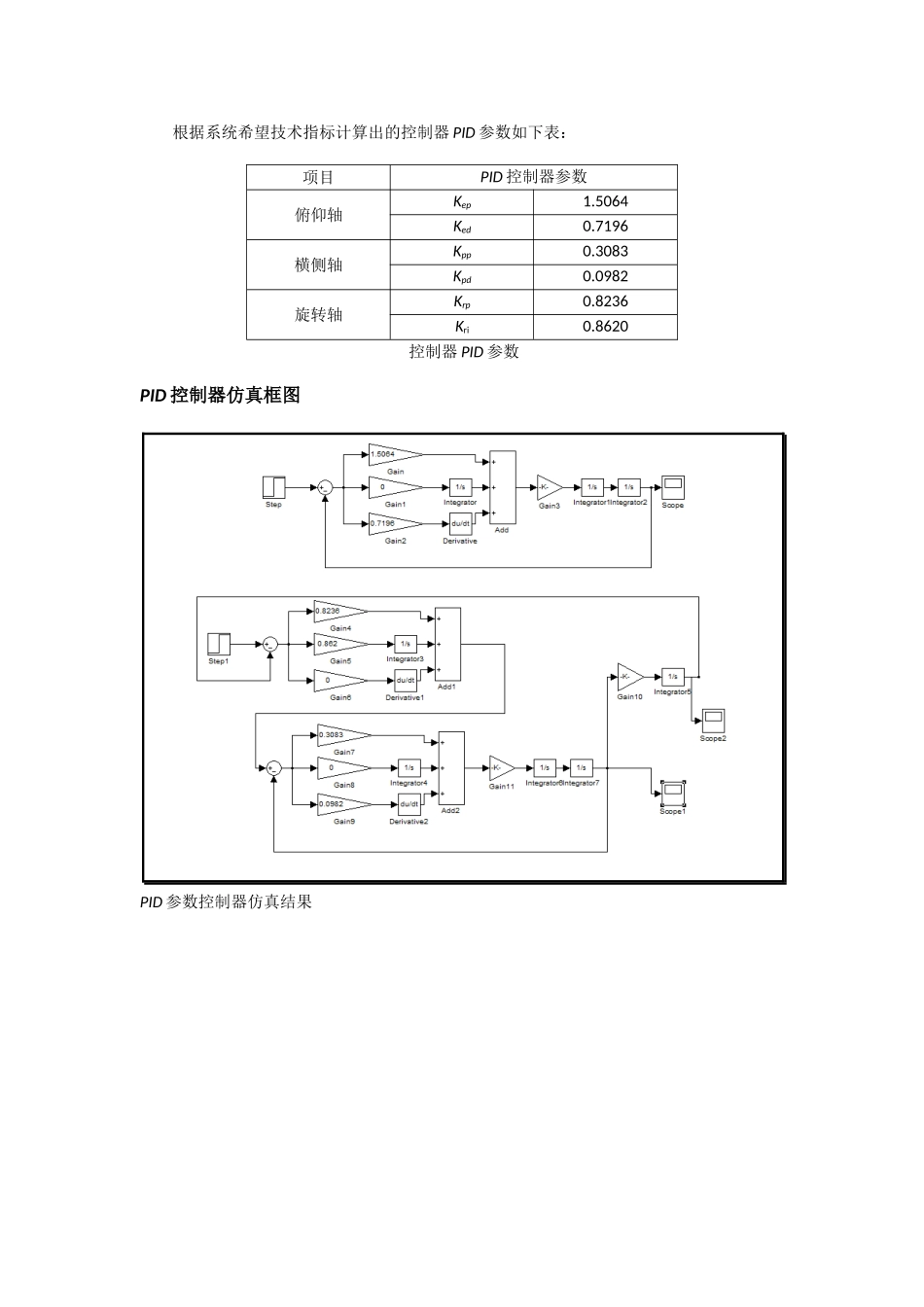
8620 控制器 PID 参数PID 控制器仿真框图PID 参数控制器仿真结果俯仰运动的阶跃响应控制效果图阶跃响应的超调量、过渡过程时间都较好
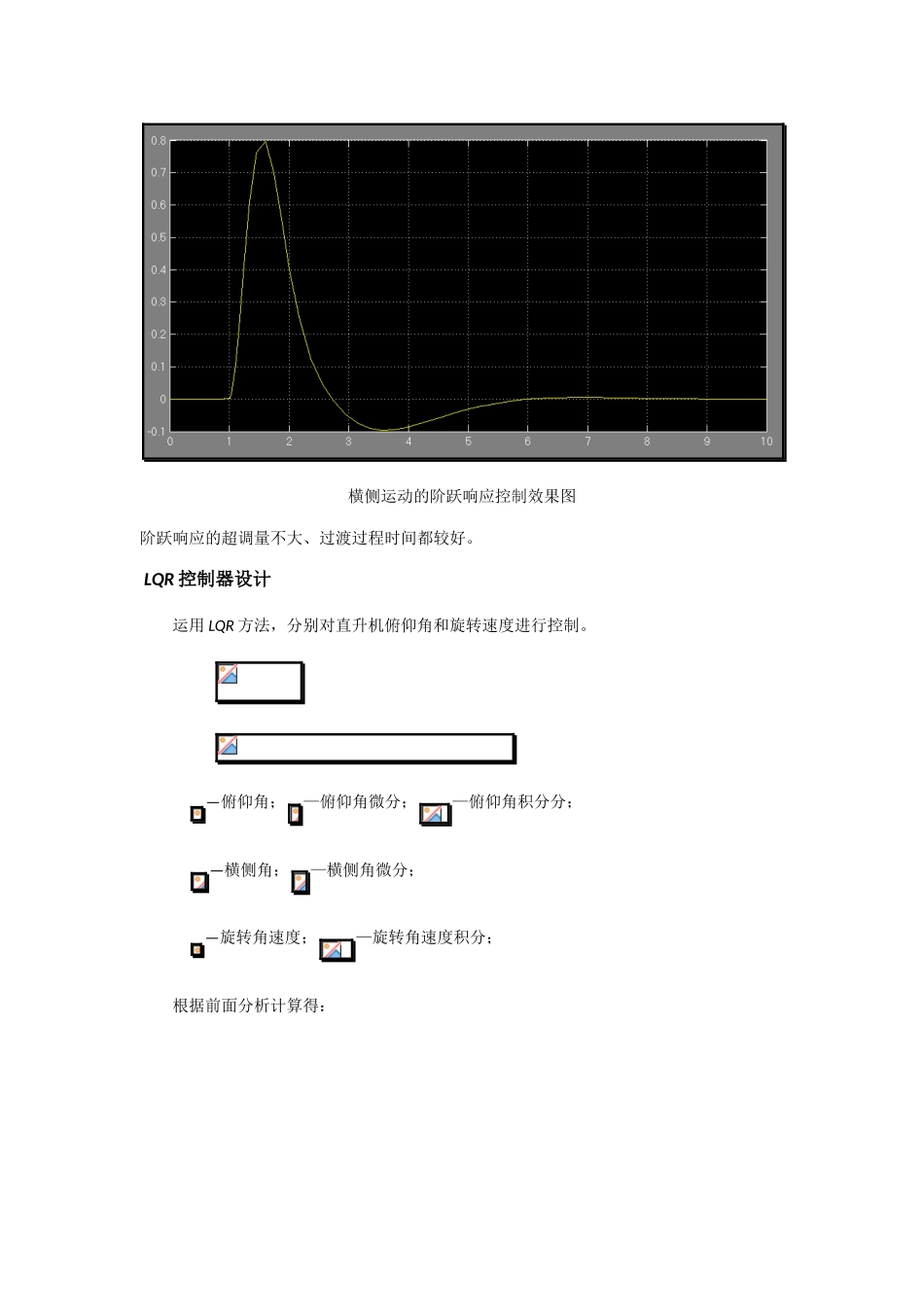
旋转运动的阶跃响应控制效果图横侧运动的阶跃响应控制效果图阶跃响应的超调量不大、过渡过程时间都较好
LQR 控制器设计运用 LQR 方法,分别对直升机俯仰角和旋转速度进行控制
—俯仰角;—俯仰角微分;—俯仰角积分分;—横侧角;—横侧角微分;—旋转角速度;—旋转角速度积分;根据前面分析计算得: 得: 其中: 选取: 通过计算求出最优控制 K 矩阵: 2
3 LQR 控制仿真 LQR 控制仿真图采纳上面计算 K 值的 LQR 控制仿真结果:假如选取: 通过计算求出最优控制 K 矩阵: 采纳上面计算 K 值的 LQR 控制仿真结果:LQR 控制仿真结果图中可知,旋转角速度超调减少,但俯仰角调整时间过长,适当增长俯仰角加速度和积分的两个量由 0
1 变到 0
5,适当加强横侧角速度和旋转角积分两个量,为此进一步调整Q 矩阵的值
假如选取: 通过计算求出最优控制 K 矩阵: 采纳上面计算 K 值的 LQR 控制仿真结果: LQR 控制仿真结果 如上图,系统响应比较好,可拟定 Q 矩阵