并联臂 3D 打印机介绍(13页)Good is good, but better carries it
精益求精,善益求善
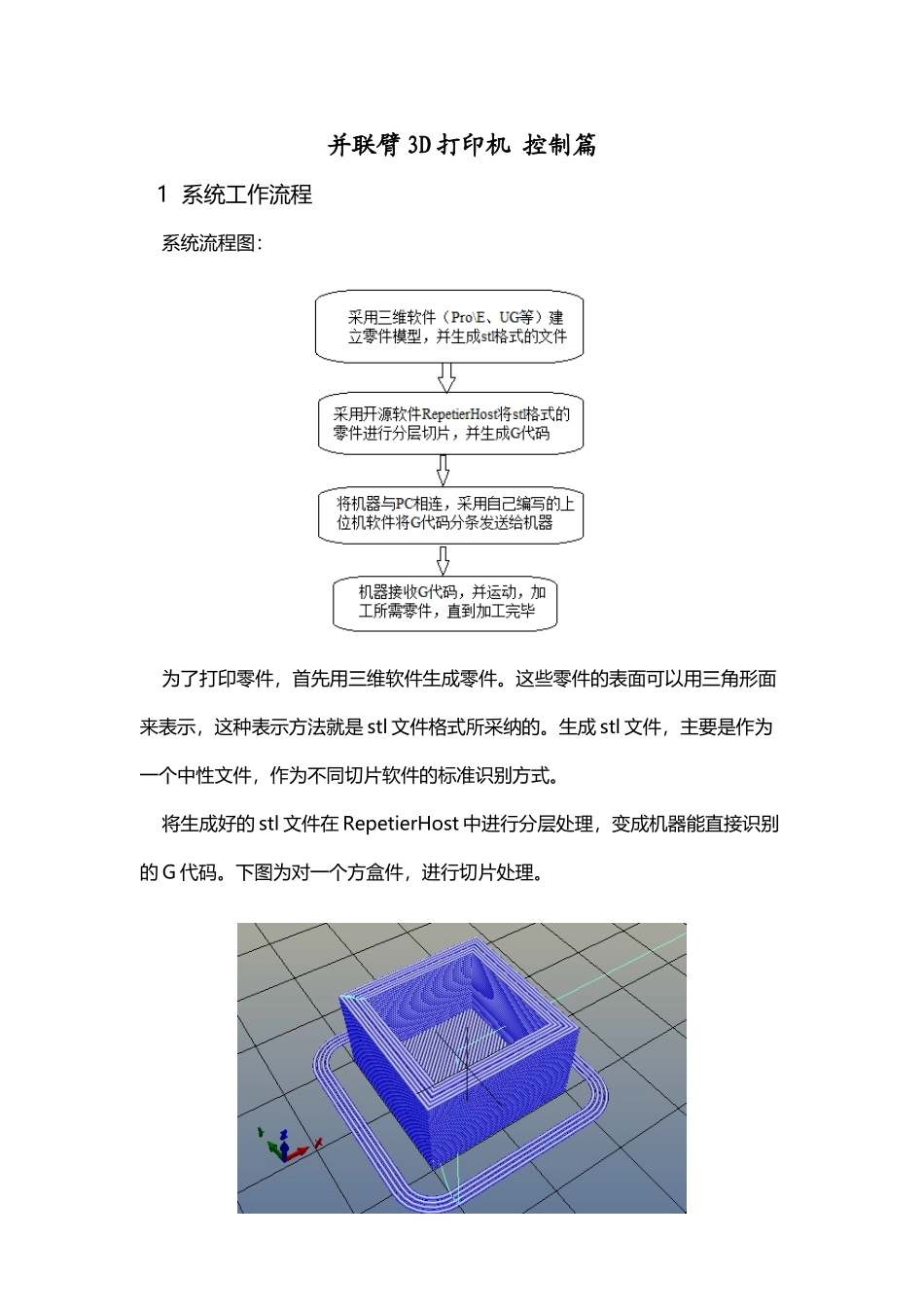
并联臂 3D 打印机 控制篇 1 系统工作流程 系统流程图: 为了打印零件,首先用三维软件生成零件
这些零件的表面可以用三角形面来表示,这种表示方法就是 stl 文件格式所采纳的
生成 stl 文件,主要是作为一个中性文件,作为不同切片软件的标准识别方式
将生成好的 stl 文件在 RepetierHost 中进行分层处理,变成机器能直接识别的 G 代码
下图为对一个方盒件,进行切片处理
之后采纳 VB2025 编写上位机,采纳串口通信的方式,将 G 代码分条发送给机器
机器接收到加工指令后,进行分析转化成加工运动,将熔化的 PLA 线材分层打印,直至加工成完整零件
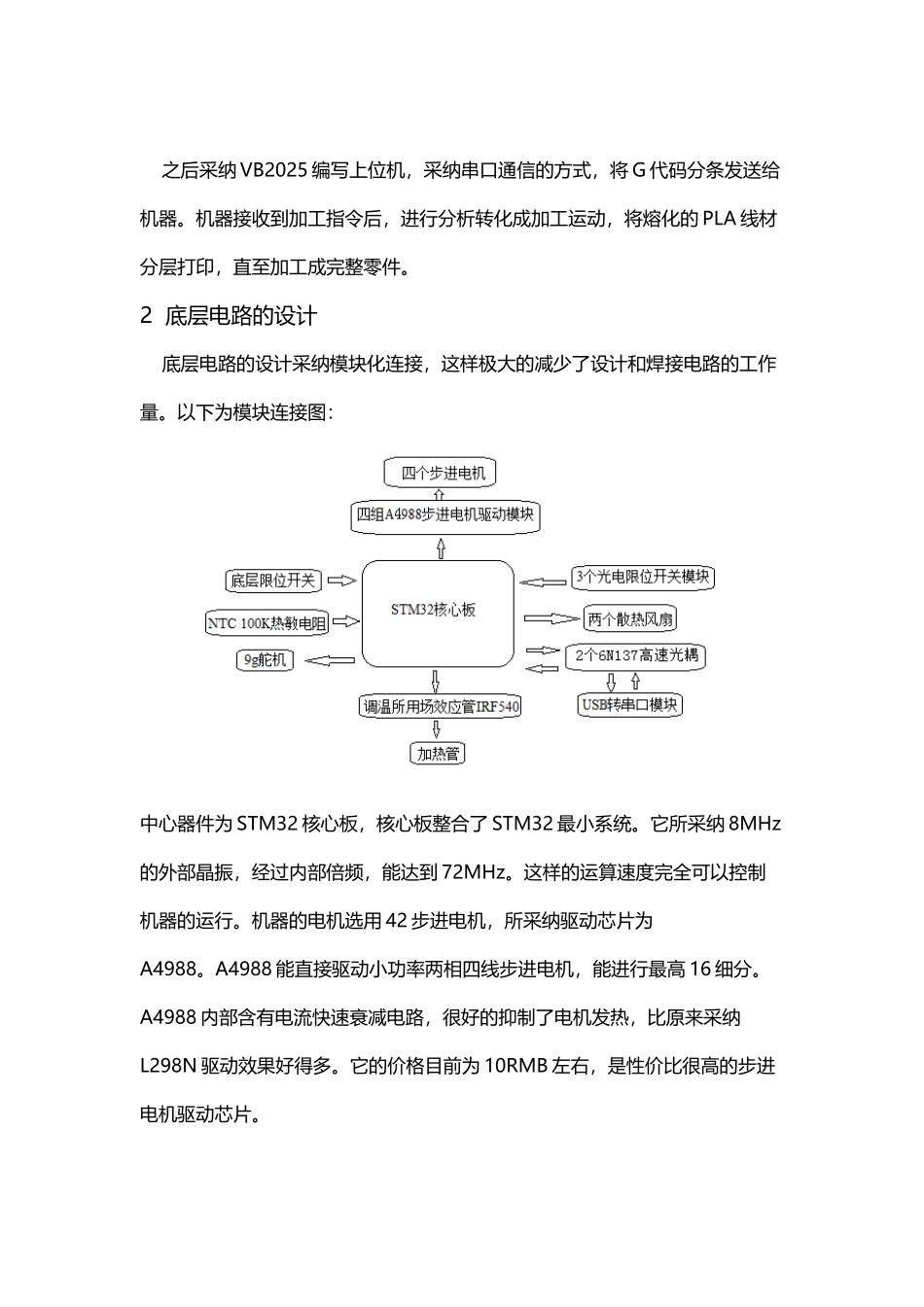
2 底层电路的设计 底层电路的设计采纳模块化连接,这样极大的减少了设计和焊接电路的工作量
以下为模块连接图: 中心器件为 STM32 核心板,核心板整合了 STM32 最小系统
它所采纳 8MHz的外部晶振,经过内部倍频,能达到 72MHz
这样的运算速度完全可以控制机器的运行
机器的电机选用 42 步进电机,所采纳驱动芯片为A4988
A4988 能直接驱动小功率两相四线步进电机,能进行最高 16 细分
A4988 内部含有电流快速衰减电路,很好的抑制了电机发热,比原来采纳L298N 驱动效果好得多
它的价格目前为 10RMB 左右,是性价比很高的步进电机驱动芯片
在打印机的顶部有 3 个光电限位开关,主要用于开机使用时,保证每个同步带运行到相同高度
底层的限位开关,用于检测底面,保证打印机运动底面与机器承件底面一致
由于在底部的限位开关比加热头的高度要低,因而加热头会接触不到承件底面,所以加设一个 9g 舵机
当要检测底面时,可以让舵机将底层限位开关放下来;当检测完毕后,再将开