由单片机组成得数字控制系统控制中,PID 控制器就是通过 PID 控制算法实现得
单片机通过 AD 对信号进行采集,变成数字信号,再在单片机中通过算法实现 PID 运算,再通过D A 把控制量反馈回控制源
从而实现对系统得伺服控制
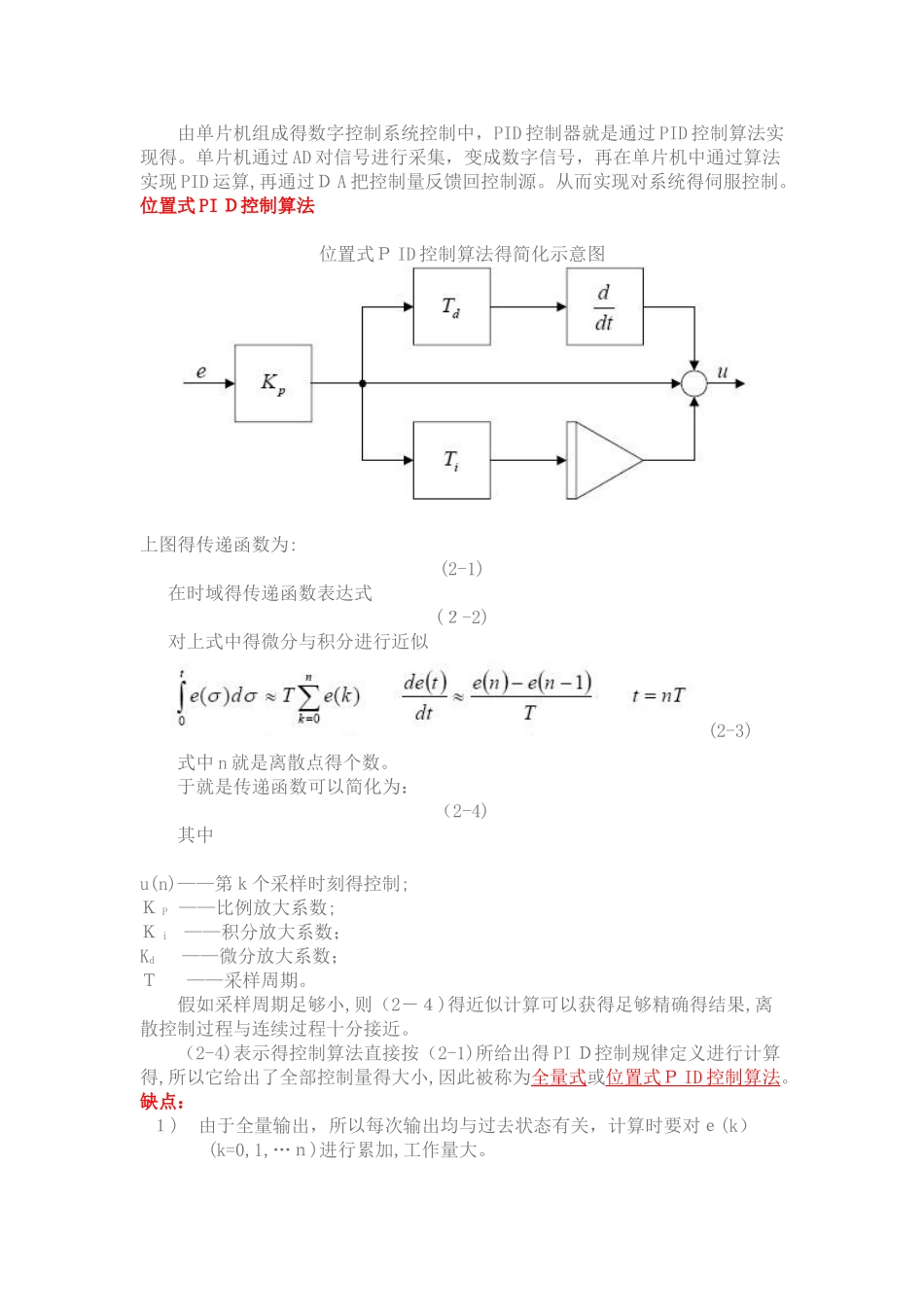
位置式 PI D控制算法位置式P ID 控制算法得简化示意图上图得传递函数为:(2-1) 在时域得传递函数表达式(2-2) 对上式中得微分与积分进行近似(2-3) 式中 n 就是离散点得个数
于就是传递函数可以简化为:(2-4)其中u(n)——第k个采样时刻得控制; K P ——比例放大系数; K i ——积分放大系数;Kd ——微分放大系数;T ——采样周期
假如采样周期足够小,则(2-4)得近似计算可以获得足够精确得结果,离散控制过程与连续过程十分接近
(2-4)表示得控制算法直接按(2-1)所给出得 PI D控制规律定义进行计算得,所以它给出了全部控制量得大小,因此被称为全量式或位置式P ID 控制算法
缺点:1) 由于全量输出,所以每次输出均与过去状态有关,计算时要对e(k)(k=0,1,…n)进行累加,工作量大
2) 因为计算机输出得 u(n)对应得就是执行机构得实际位置,假如计算机出现故障,输出 u(n)将大幅度变化,会引起执行机构得大幅度变化,有可能因此造成严重得生产事故,这在实际生产中就是不允许得
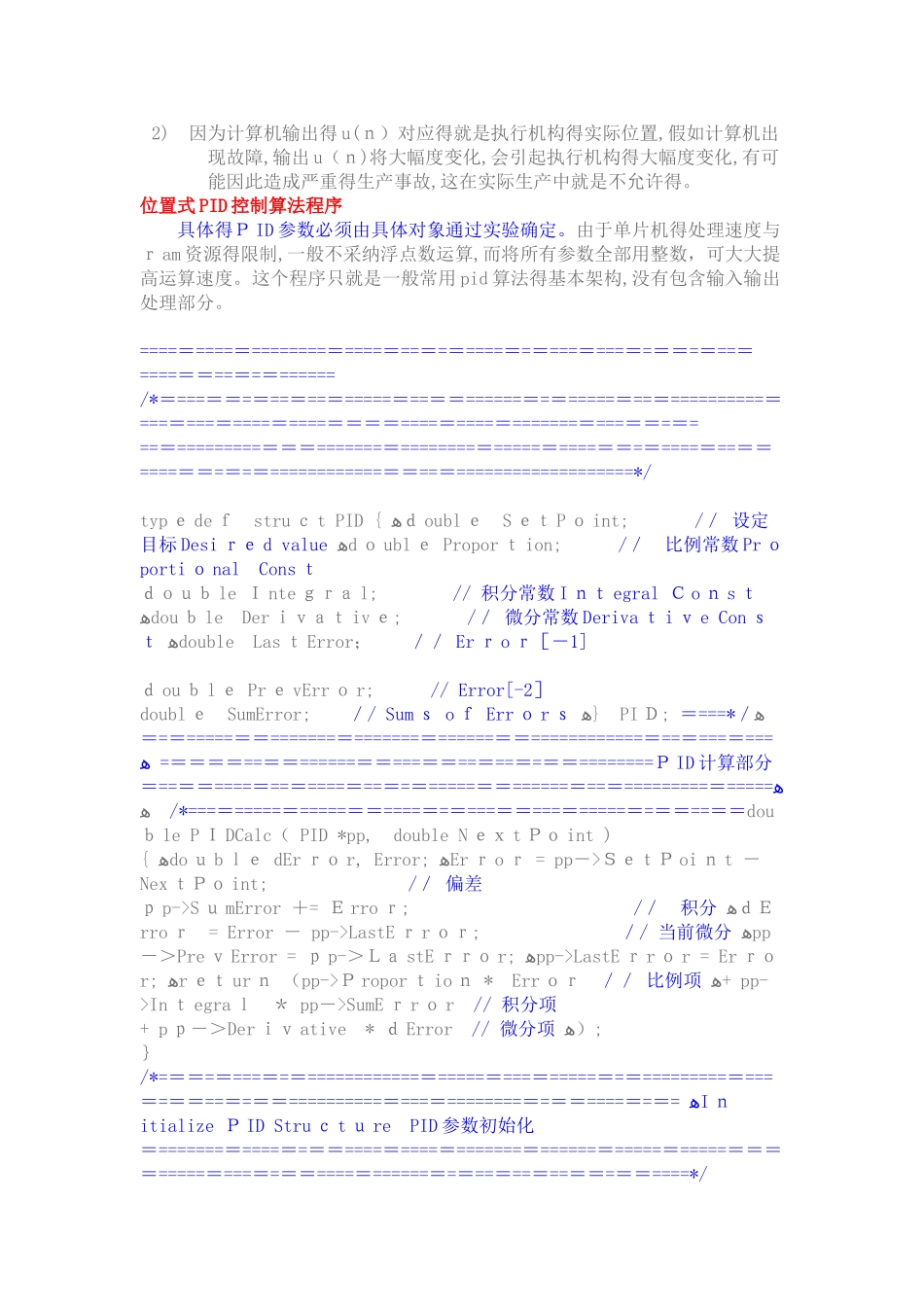
位置式 PID 控制算法程序具体得P ID 参数必须由具体对象通过实验确定
由于单片机得处理速度与r am 资源得限制,一般不采纳浮点数运算,而将所有参数全部用整数,可大大提高运算速度
这个程序只就是一般常用 pid 算法得基本架构,没有包含输入输出处理部分
=====================================================================/*================