RLS 自适应滤波器仿真作业工程 1 班220250820 王子豪1
步骤1)令 hM(—1)=0,计算滤波器的输出 d(n)=XMT=hM(n-1);2)计算误差值 eM(n)=d(n)—d(n,n—1);3)计算 Kalman 增益向量 KM(n);4)更新矩阵的逆 RM—1(N)=PM(N);5)计算 hM(n)=hM(n-1)+KM(n)eM(n);2
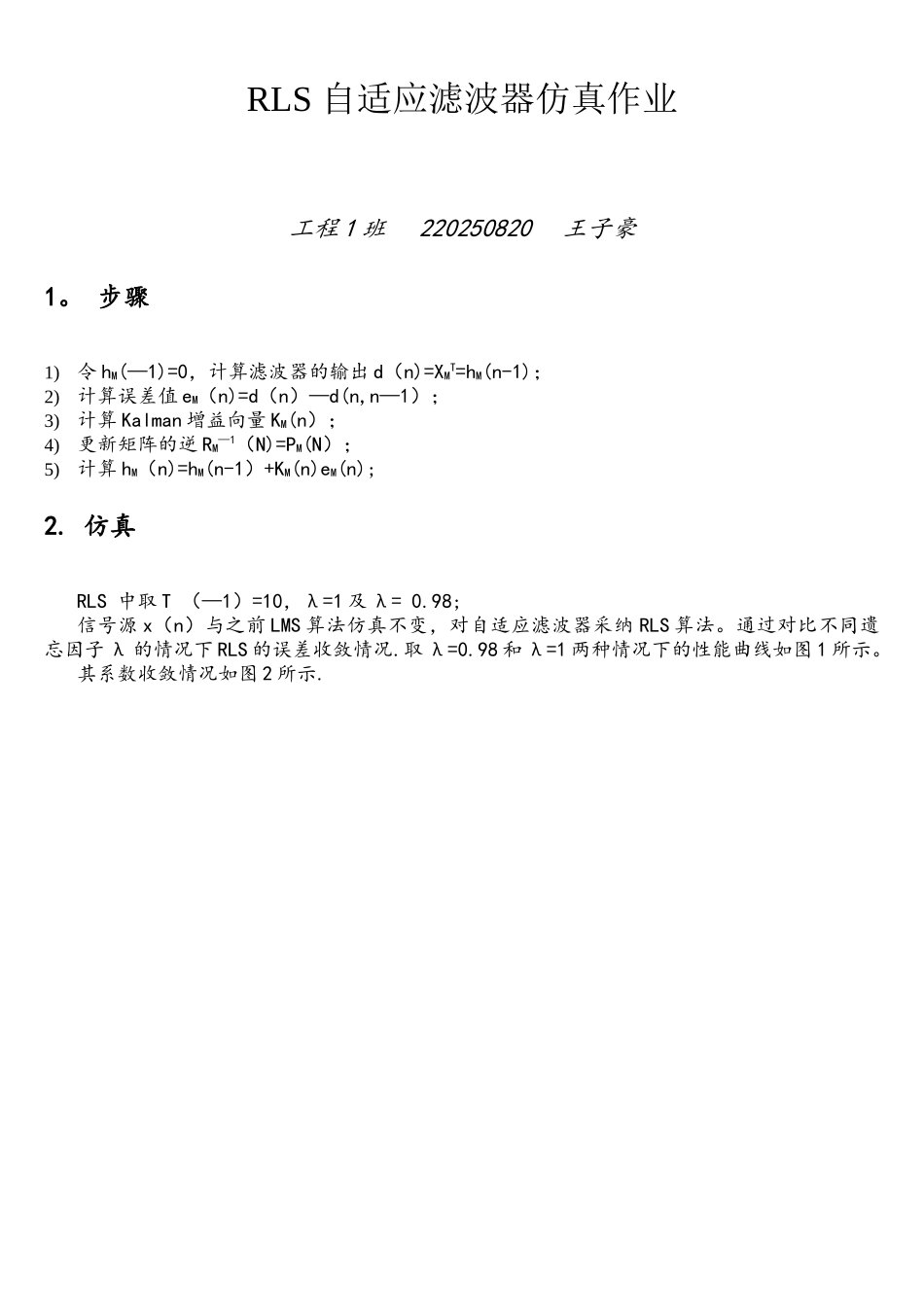
仿真RLS 中取 T (—1)=10,λ=1 及 λ= 0
98;信号源 x(n)与之前 LMS 算法仿真不变,对自适应滤波器采纳 RLS 算法
通过对比不同遗忘因子 λ 的情况下 RLS 的误差收敛情况
98 和 λ=1 两种情况下的性能曲线如图 1 所示
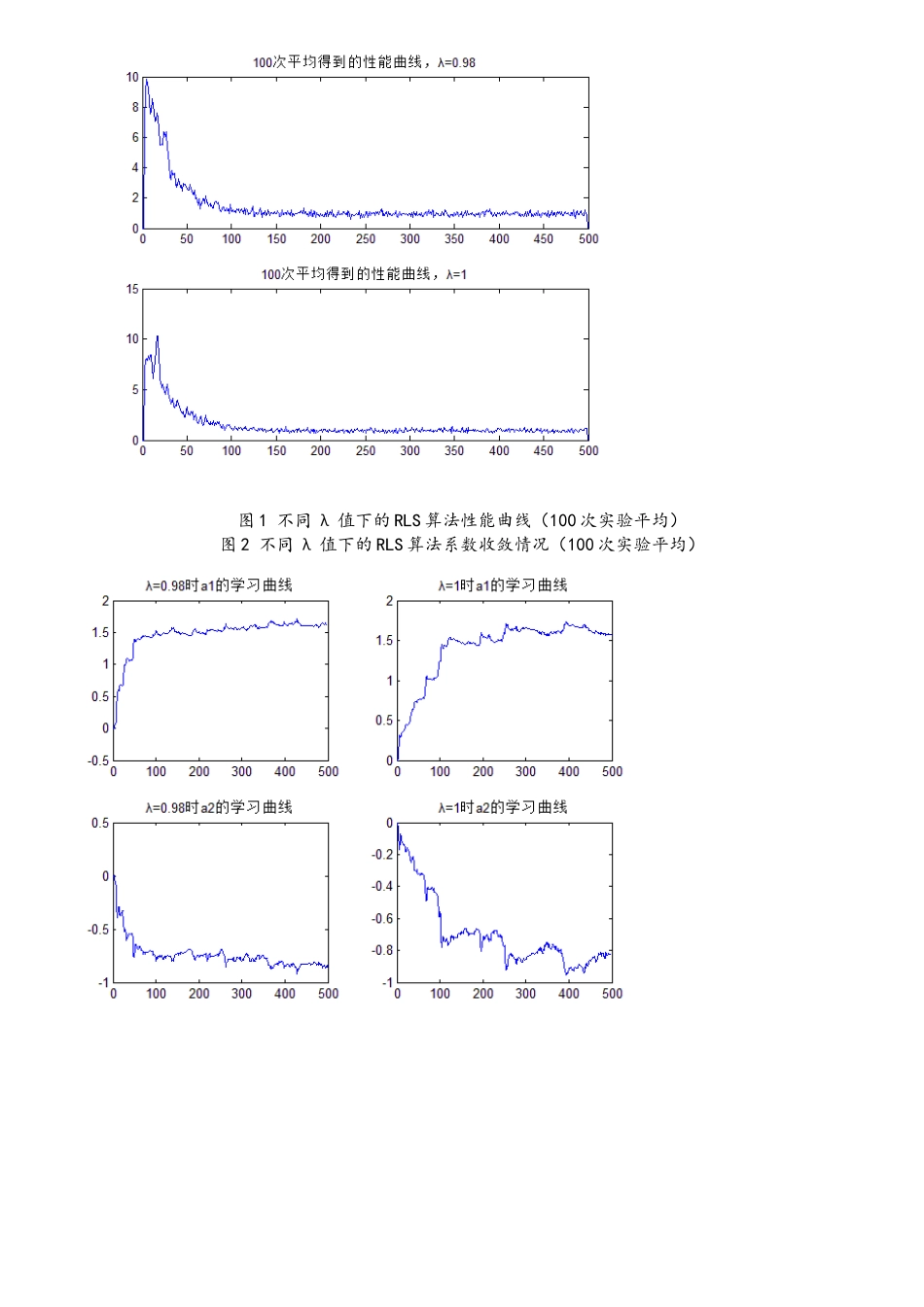
其系数收敛情况如图 2 所示
图 1 不同 λ 值下的 RLS 算法性能曲线(100 次实验平均)图 2 不同 λ 值下的 RLS 算法系数收敛情况(100 次实验平均)3
结果分析RLS 算法在算法的稳态阶段、即算法的后期收敛阶段其性能和 LMS 算法相差不明显
但在算法的前期收敛段,RLS 算法的收敛速度要明显高于 LMS 算法
但是 RLS 算法复杂度高,计算量比较大
遗忘因子 λ 越小,系统的跟踪能力越强,同时对噪声越敏感;其值越大,系统跟踪能力减弱,但对噪声不敏感,收敛时估量误差也越小
Matlab 程序clear;clc;N=2048; %信号的取样点数M=2;%滤波器抽头的个数iter=500;%迭代次数%初始化X_A=zeros(M,1);%X 数据向量y=zeros(1,N);%预测输出err=zeros(1,iter);%误差向量errp=zeros(1,iter);%平均误差wR=zeros(M,iter); %每一行代表一次迭代滤波器的 M 个抽头参数T=eye(M,M)*10; %RLS 算法下 T 参数的初始化