**********************************************参赛学校:* * ** * * * *** ** ** * *** 参赛队号:**** * *** *** * **** ** 参赛题目:( A 题)智能小车控制 参赛学生:* * **** *** * ** **** * ** 指导老师:* *** * * ***** * * * **** * 参赛日期: 2025
18 ~ 2025
22 智能小车控制摘要智能作为现代的新发明,是以后的进展方向,它可以根据预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等用途
我们通过软件编程实现它的行进、绕障、停止的精确控制以及遇障次数的显示,并再次寻找到原来的轨道
一、功能说明1、基本功能:小车能够在设计的线路上完成寻迹功能;2、拓展功能:在循迹线路上设置障碍物,小车遇到障碍物能够自动绕道行驶,完成避障功能;二、方案论证方案一:以 AT89S51 单片机为核心的控制电路,采纳模块化的设计方案,运用传感器检测电路,实现小车在行驶中自动寻迹、躲避障碍物的功能
并将循迹过程中遇障次数等数据传至单片机进行处理,然后由单片机根据所检测数据实现对电动小车的智能化控制
方案二:采纳各类数字电路来组成电动小车的控制系统
采纳数字电路对外围探测轨迹信号,避障信号进行处理
但对输入输出都是模拟量的小装置,假如采纳数字化方案,则要先用 A/D 转换器和 D/A 转换器实现数字量与模拟量之间的转换
这样必定带来高成本、电路复杂等缺点
因此,本方案灵活性不高,效率低,不利于电动小车智能化的扩展
同时,对各路信号处理也比较困难
比较以上两种方案的优缺点,方案一简洁、灵活、可扩展性好,能达到设计要求,因此本设计采纳方案一来实现
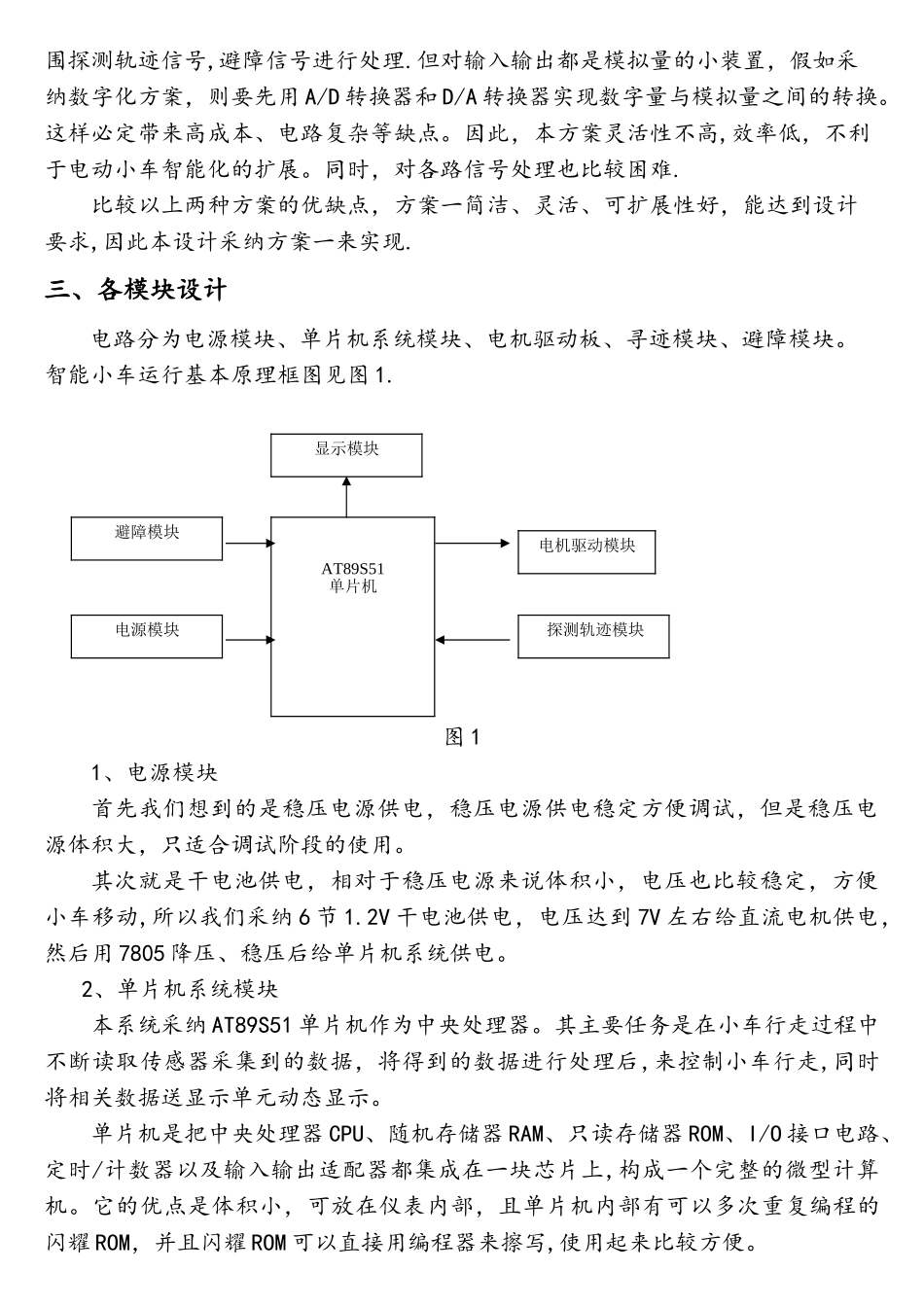
三、各模块设计电路分为电源模块、单片机系统模块、电机驱动板、