实验二 控制系统的动态响应及其稳定性分析一、实验目的1.学习瞬态性能指标的测试技术;2.记录不同开环增益时二阶系统的阶跃响应曲线,并测出系统的超调量 σ%、峰值时间 tp和调节时间 ts;3.熟悉闭环控制系统的稳定和不稳定现象,并加深理解线性系统的稳定性只与其结构和参量有关,而与外作用无关的性质
二、实验仪器1.MATLAB 软件三、实验原理对一个二阶系统加入一个阶跃信号时,系统就有一个输出响应,其响应将随着系统参数变化而变化
二阶系统的特性由两个参数来描述:一个为系统的阻尼比 ξ,一个为系统的无阻尼自然频率 ω
当两个参数变化时,都会引起系统的调节时间、超调量、振荡次数的变化
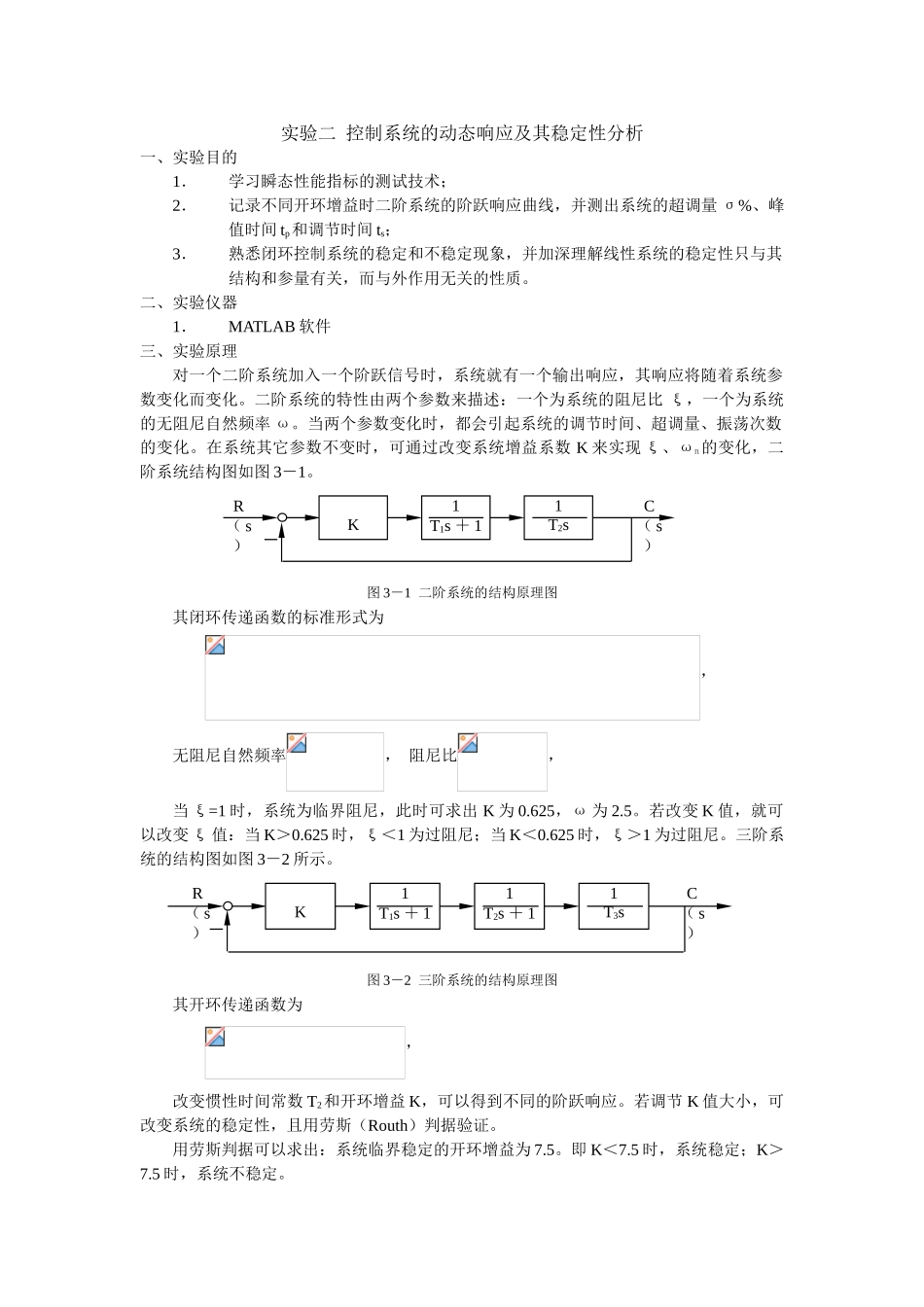
在系统其它参数不变时,可通过改变系统增益系数 K 来实现 ξ、ωn的变化,二阶系统结构图如图 3-1
图 3-1 二阶系统的结构原理图其闭环传递函数的标准形式为,无阻尼自然频率, 阻尼比,当 ξ=1 时,系统为临界阻尼,此时可求出 K 为 0
625,ω 为 2
若改变 K 值,就可以改变 ξ 值:当 K>0
625 时,ξ<1 为过阻尼;当 K<0
625 时,ξ>1 为过阻尼
三阶系统的结构图如图 3-2 所示
图 3-2 三阶系统的结构原理图其开环传递函数为,改变惯性时间常数 T2和开环增益 K,可以得到不同的阶跃响应
若调节 K 值大小,可改变系统的稳定性,且用劳斯(Routh)判据验证
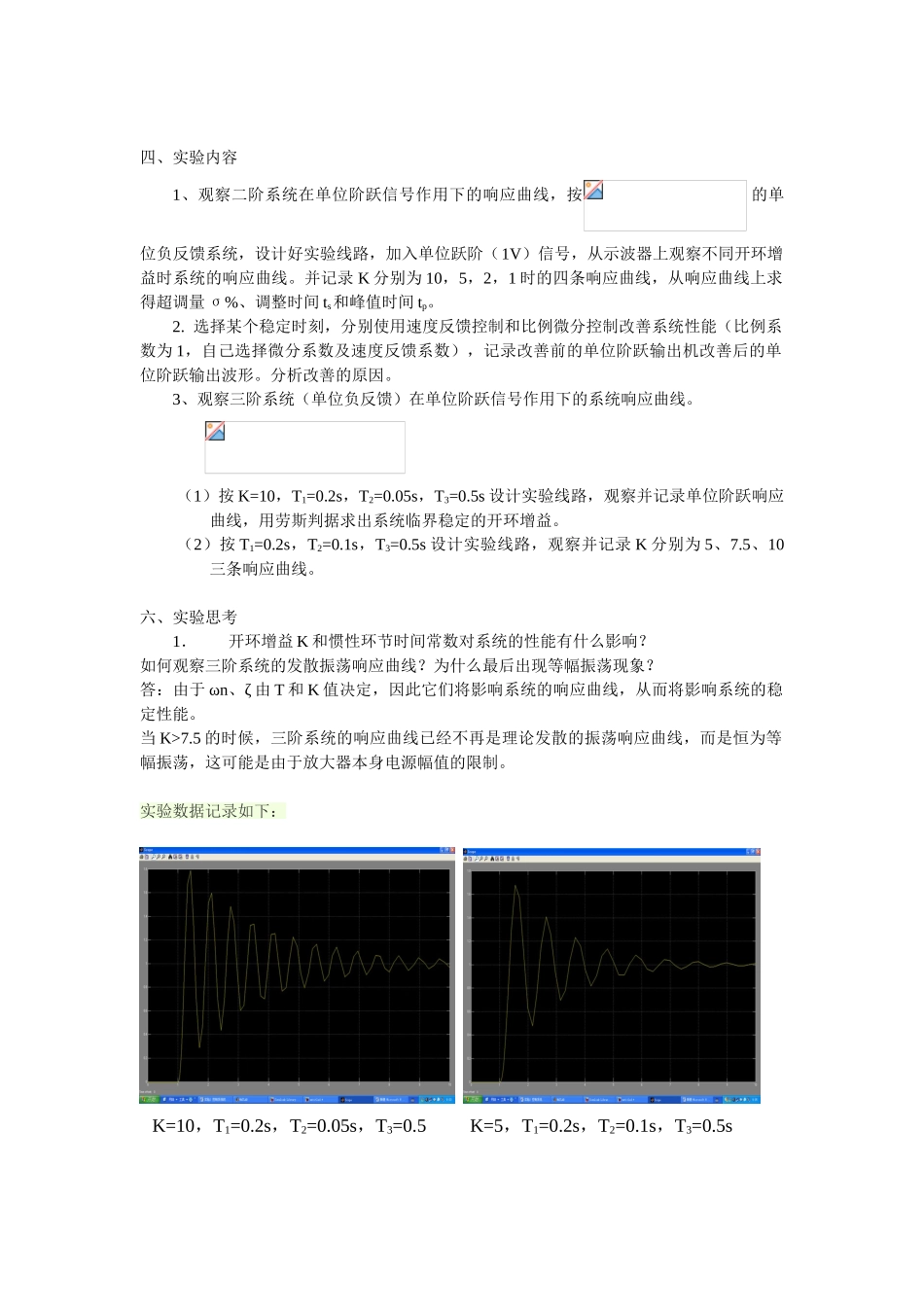
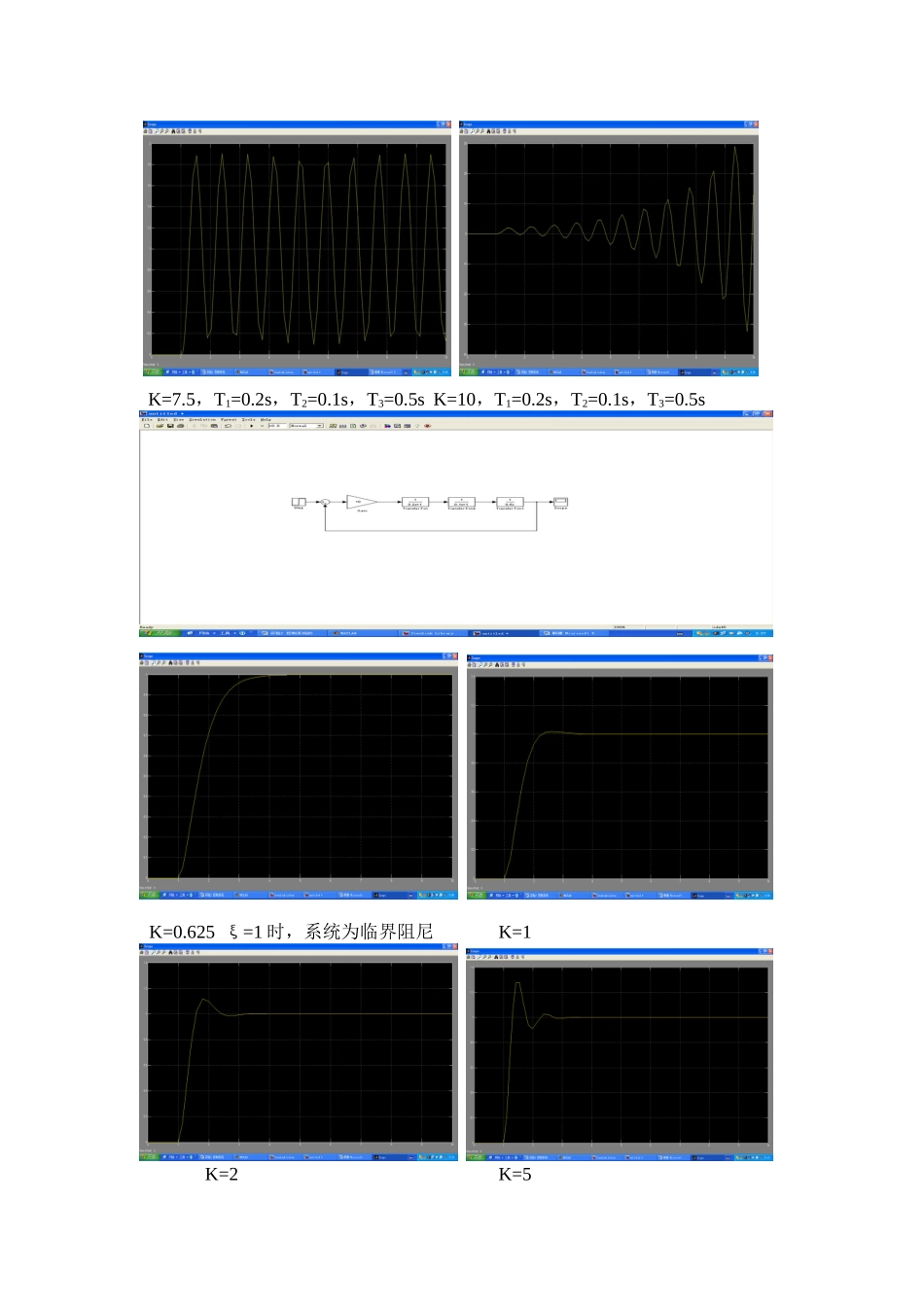
用劳斯判据可以求出:系统临界稳定的开环增益为 7
5 时,系统稳定;K>7
5 时,系统不稳定
R( s)C( s)1T2s1T1s + 1KR( s)C( s)1T2s + 11T1s + 11T3sK四、实验内容1、观察二阶系统在单位阶跃信号作用下的响应曲线,按 的单位负反馈系统,设计好实验线路,加入单位跃阶(1V)信号,从示波器上观察不同开环增益时系统的响应曲线
并记录 K 分别