PID 控制中如何整定 PID 参数1,概述作为经典的控制理论,PID 控制规律仍然是当今工控行业的主导控制方式,无论复杂、简单的控制任务,PID 控制都能取得满意的控制效果,前提是 PID 参数必须选择合适
可以说,通过适当的 PID 参数,PID 控制可以得到各种输出响应特性,也就是说,通过适当给定 PID 参数,大多数的控制任务都可以由 PID 完成
本文根据经典 PID 控制理论,结合玖阳自动化科技公司的一线通模块,详细介绍 PID 参数在整个控制过程中所起的作用,指导 PID 控制中的参数整定
2,PID 模块介绍WT405-5 为可编程 PID 控制模块,模块内部有 40 余种命令语言,每个命令语言执行一定的运算功能,根据实际要求,将多条命令语言组合在一起即构成模块的控制程序
通过编程,模块可实现单回路 PID、串级三冲量 PID、导前微分 PID 及自动/手动无扰切换等复杂的控制功能
模块具有掉电保护功能,复位或重新上电时能自动恢复掉电前的工作状态,接续原来的工作状态进行控制
模块本身具有 PID 控制所必须的模拟量输入、模拟量输出、开关量输入、开关量输出通道,能不依赖网络而独立进行PID 控制,该控制方案安全、可靠
PID 参数、PID 定值及控制程序的修改可通过网络实现
4 路模拟量输入通道可以单独设置分度类型,采集各种类型的模拟量信号
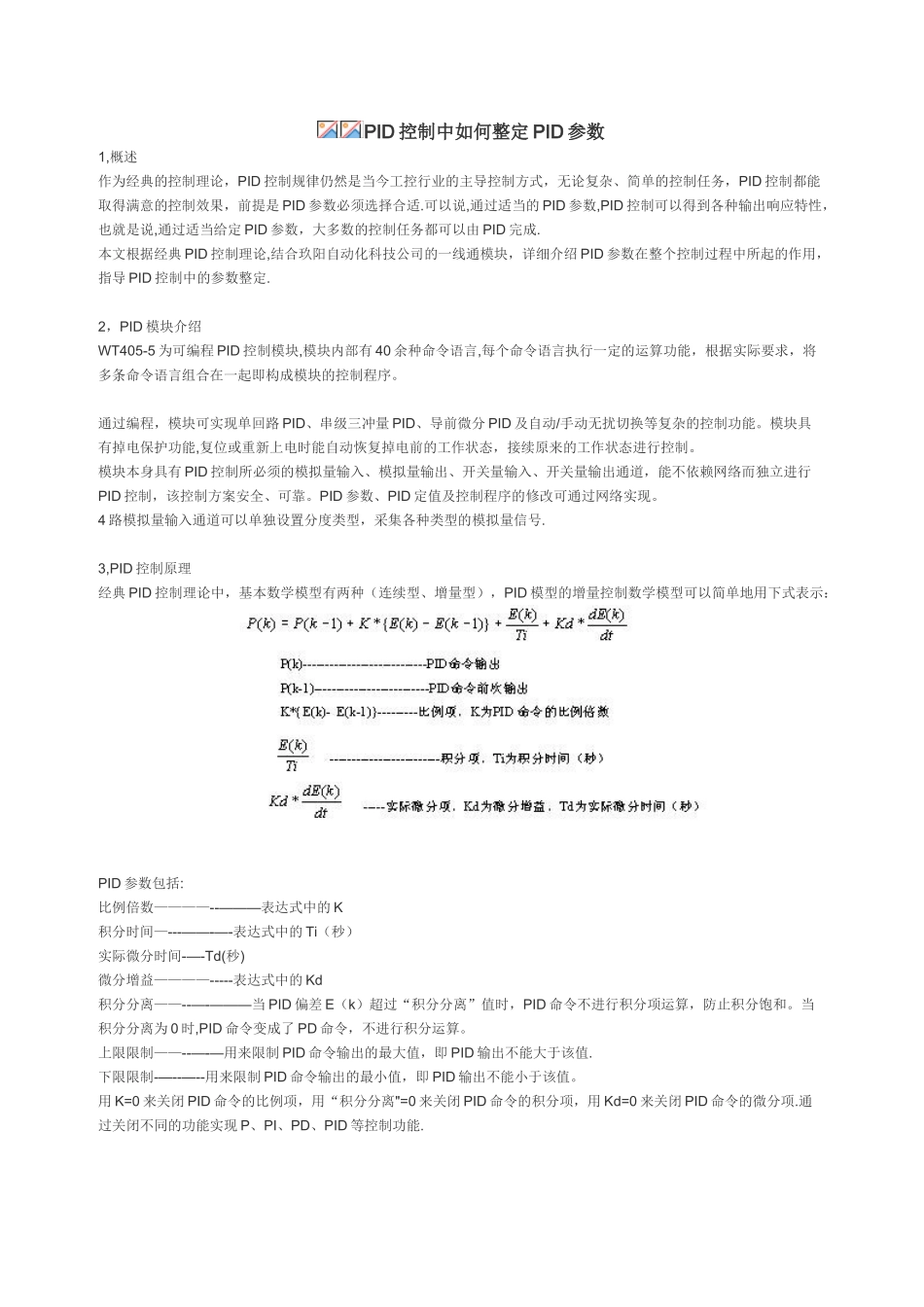
3,PID 控制原理经典 PID 控制理论中,基本数学模型有两种(连续型、增量型),PID 模型的增量控制数学模型可以简单地用下式表示:PID 参数包括:比例倍数————--———表达式中的 K积分时间—---——-—-表达式中的 Ti(秒)实际微分时间-—-Td(秒)微分增益————-----表达式中的 Kd积分分离——--—-———当 PID 偏差 E(k)超过“积分分离”值时,PID 命令不进行积分项运算,防止积分饱