《机械设计基础》第 1 章 机械设计概论复习重点1
机械零件常见的失效形式2
机械设计中,主要的设计准则习题1-1 机械零件常见的失效形式有哪些
1-2 在机械设计中,主要的设计准则有哪些
1—3 在机械设计中,选用材料的依据是什么
第 2 章 润滑与密封概述复习重点1
摩擦的四种状态2
常用润滑剂的性能习题2-1 摩擦可分哪几类
2-2 润滑剂的作用是什麽
常用润滑剂有几类
第 3 章平面机构的结构分析复习重点1、机构及运动副的概念2、自由度计算平面机构:各运动构件均在同一平面内或相互平行平面内运动的机构,称为平面机构
1 运动副及其分类 运动副:构件间的可动联接
(既保持直接接触,又能产生一定的相对运动)根据接触情况和两构件接触后的相对运动形式的不同,通常把平面运动副分为低副和高副两类
2 平面机构自由度的计算一个作平面运动的自由构件具有三个自由度,若机构中有 n 个活动构件(即不包括机架),在未通过运动副连接前共有 3n 个自由度
当用 PL 个低副和 PH 个高副连接组成机构后,每个低副引入两个约束,每个高副引入一个约束,共引入 2PL+PH 个约束,因此整个机构相对机架的自由度数,即机构的自由度为 F=3n-2PL-PH (1—1)下面举例说明此式的应用
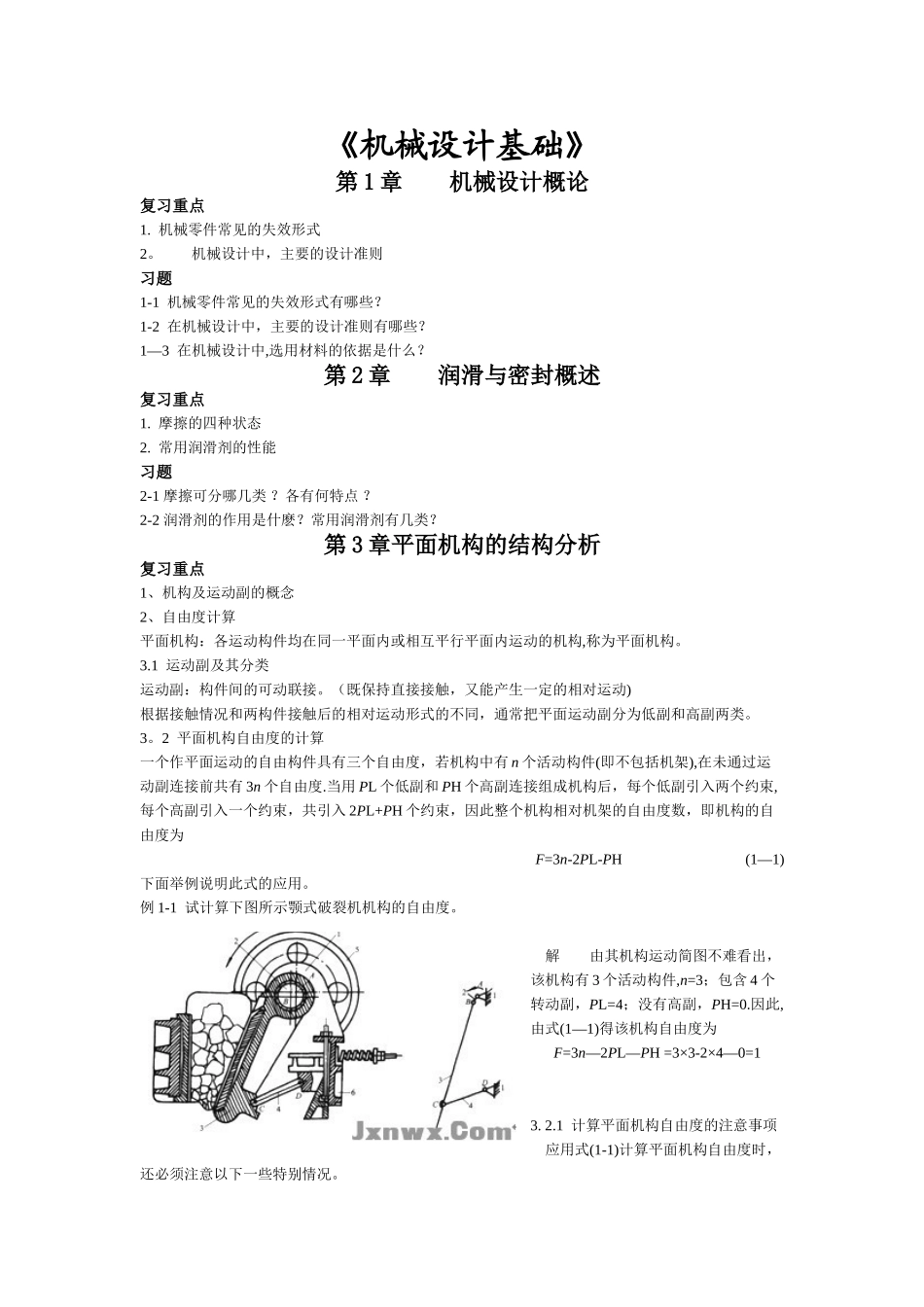
例 1-1 试计算下图所示颚式破裂机机构的自由度
解 由其机构运动简图不难看出,该机构有 3 个活动构件,n=3;包含 4 个转动副,PL=4;没有高副,PH=0
因此,由式(1—1)得该机构自由度为F=3n—2PL—PH =3×3-2×4—0=13
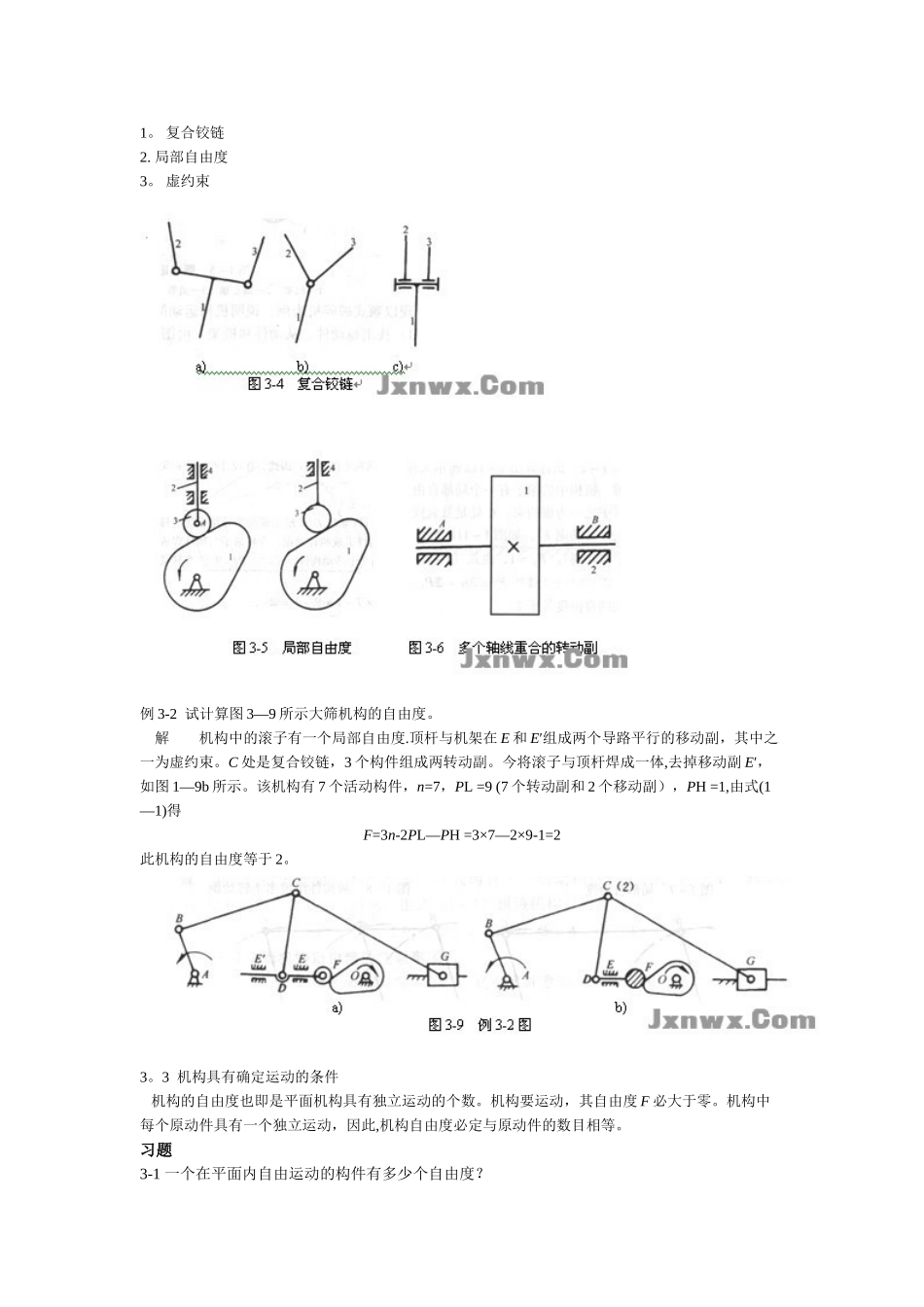
1 计算平面机构自由度的注意事项 应用式(1-1)计算平面机构自由度时,还必须注意以下一些特别情况
局部自由度 3
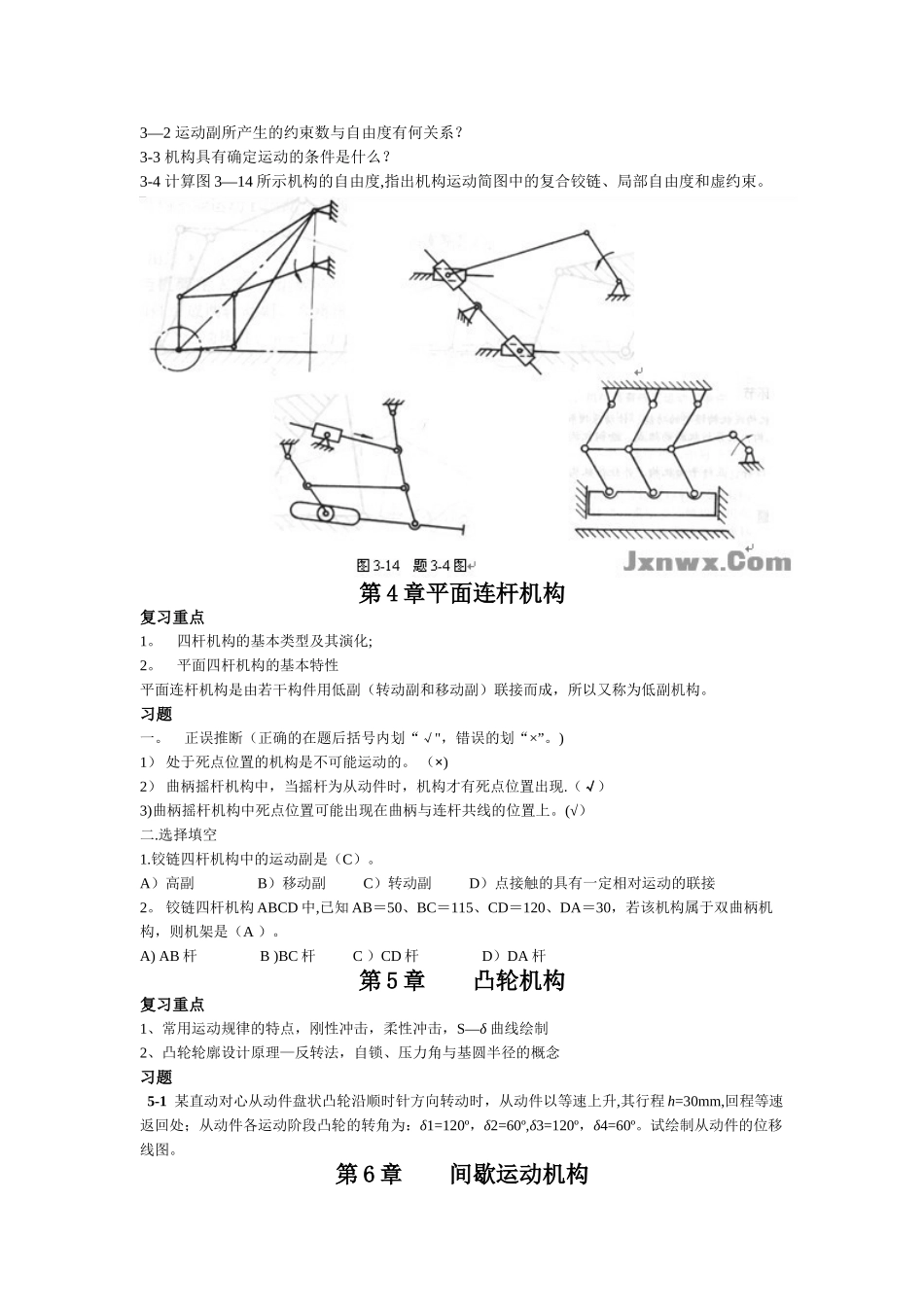
虚约束 例 3-2 试计算图 3—9 所示大筛机构的自由度
解 机构中的滚子有一个局部