第1页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共46页项目一:焊接机器人1
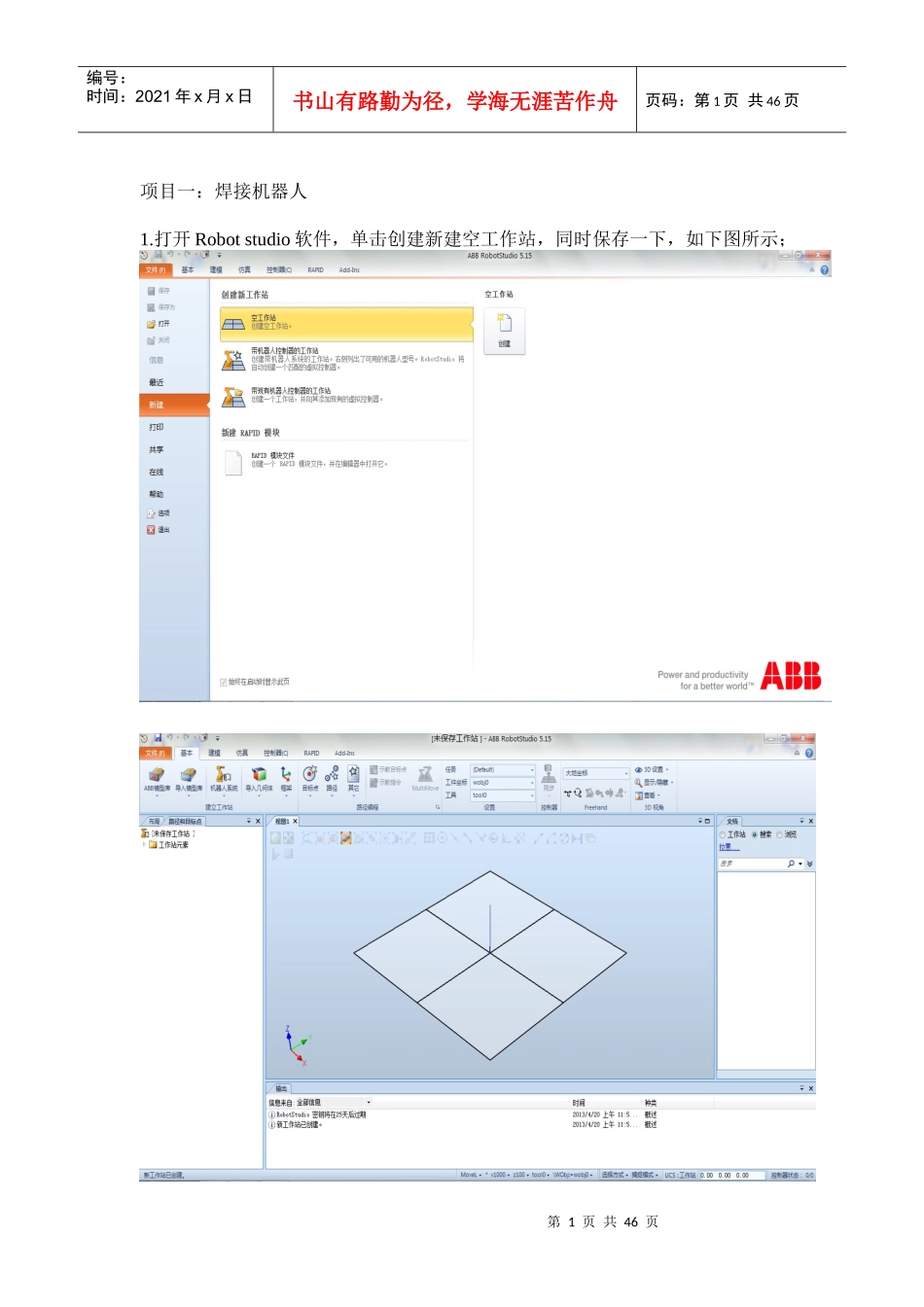
打开Robotstudio软件,单击创建新建空工作站,同时保存一下,如下图所示;第2页共46页第1页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共46页2
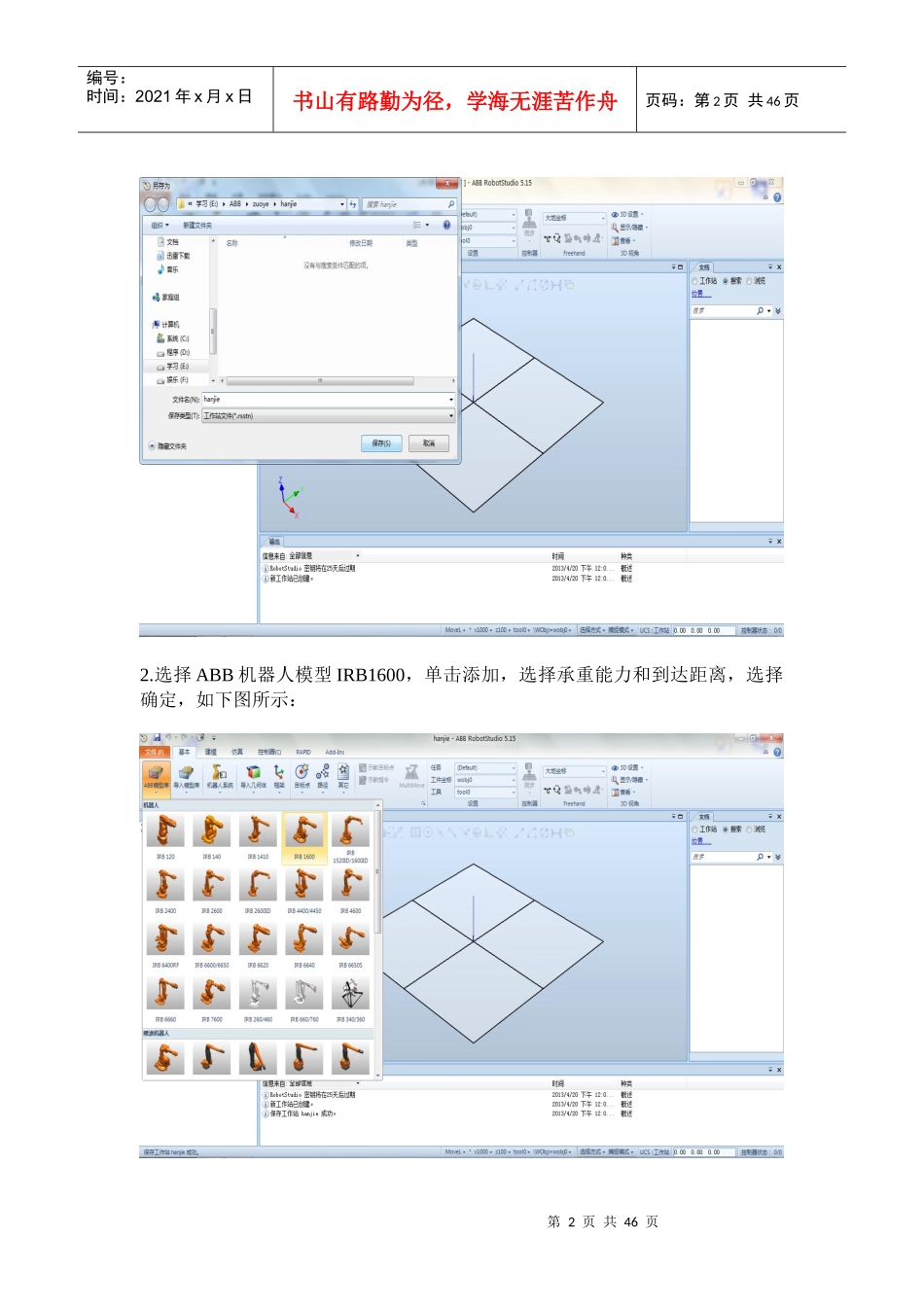
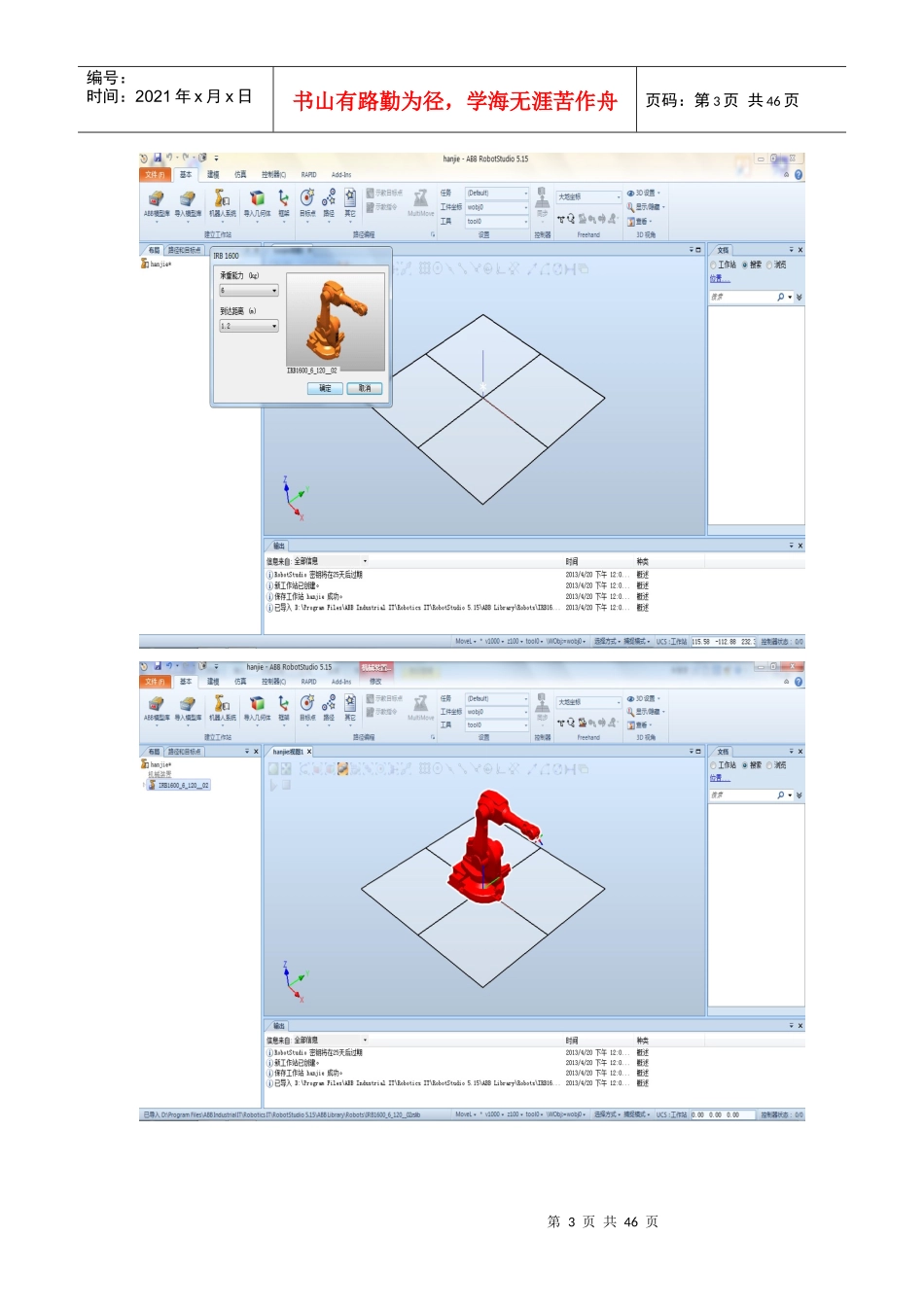
选择ABB机器人模型IRB1600,单击添加,选择承重能力和到达距离,选择确定,如下图所示:第3页共46页第2页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共46页第4页共46页第3页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第4页共46页3
导入设备-tools-Binzelair22,并拖动安装在机器人法兰盘上:第5页共46页第4页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第5页共46页4
选择建模-固体-矩形体,设定长宽高,点击创建:第6页共46页第5页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第6页共46页5
选择基本-机器人系统-从布局创建系统-下一步-下一步-完成;第7页共46页第6页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第7页共46页第8页共46页第7页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第8页共46页6
控制器启动完成后,选择路径-创建一个空路径,第9页共46页第8页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第9页共46页7
创建成功后,修改下方参数:moveJ,V1000,Z100第10页共46页第9页共46页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第10页共46页8
激活当前路径,选择机器人起