第1页共8页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共8页倒立摆创新实验指导书--线性二次最优LQR控制实验一、实验目的让实验者了解并掌握线性二次最优控制LQR控制的原理和方法,学习如何使用最优控制算法对直线一级倒立摆系统进行设计控制实验
二、设计要求用最优控制算法设计控制器,使得当在小车上施加0
1m的阶跃信号时,闭环系统的响应指标为:1
杆的上升时间小于2秒2
动态误差小于2%3
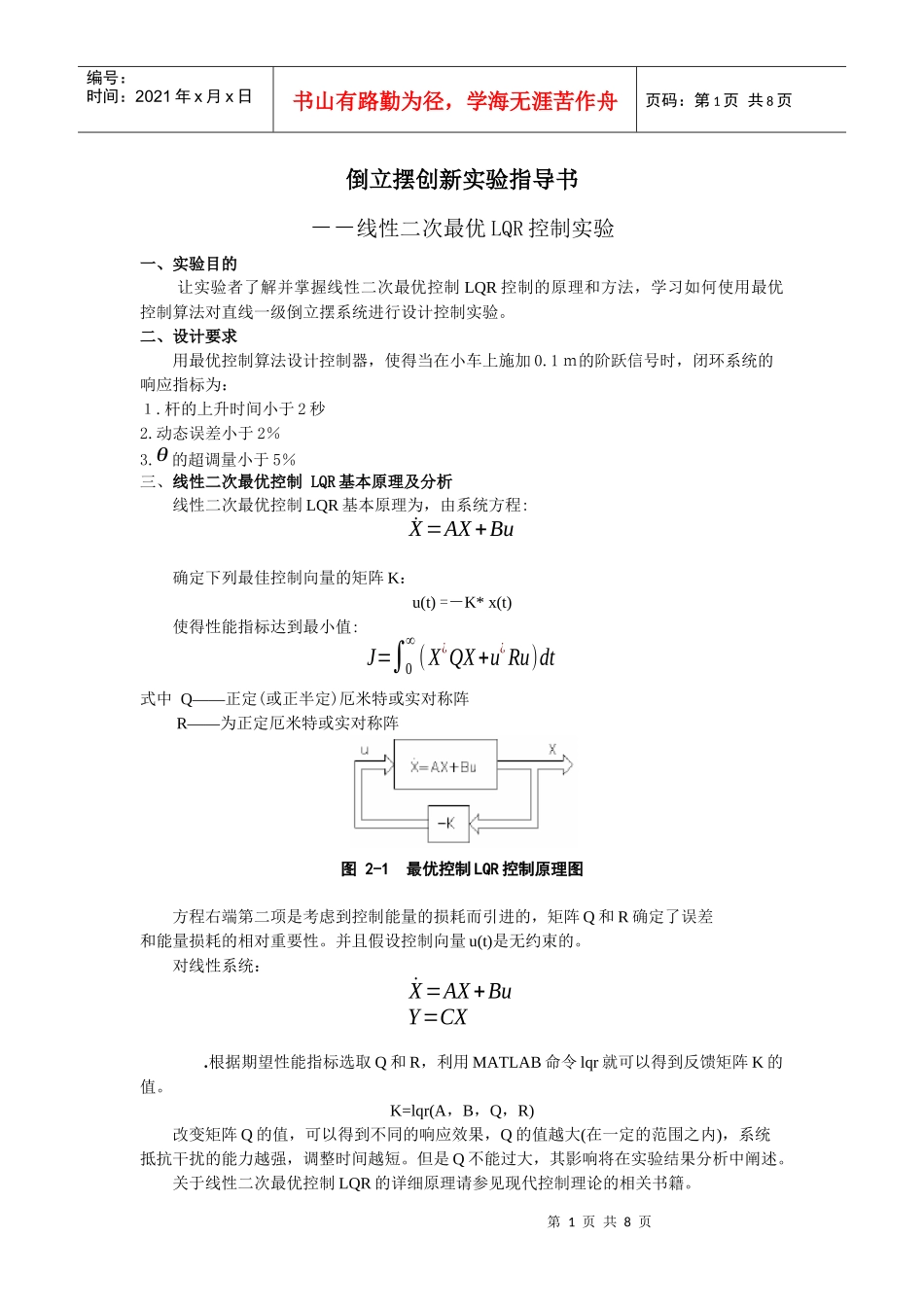
θ的超调量小于5%三、线性二次最优控制LQR基本原理及分析线性二次最优控制LQR基本原理为,由系统方程:˙X=AX+Bu确定下列最佳控制向量的矩阵K:u(t)=-K*x(t)使得性能指标达到最小值:J=∫0∞(X¿QX+u¿Ru)dt式中Q——正定(或正半定)厄米特或实对称阵R——为正定厄米特或实对称阵图2-1最优控制LQR控制原理图方程右端第二项是考虑到控制能量的损耗而引进的,矩阵Q和R确定了误差和能量损耗的相对重要性
并且假设控制向量u(t)是无约束的
对线性系统:˙X=AX+BuY=CX
根据期望性能指标选取Q和R,利用MATLAB命令lqr就可以得到反馈矩阵K的值
K=lqr(A,B,Q,R)改变矩阵Q的值,可以得到不同的响应效果,Q的值越大(在一定的范围之内),系统抵抗干扰的能力越强,调整时间越短
但是Q不能过大,其影响将在实验结果分析中阐述
关于线性二次最优控制LQR的详细原理请参见现代控制理论的相关书籍
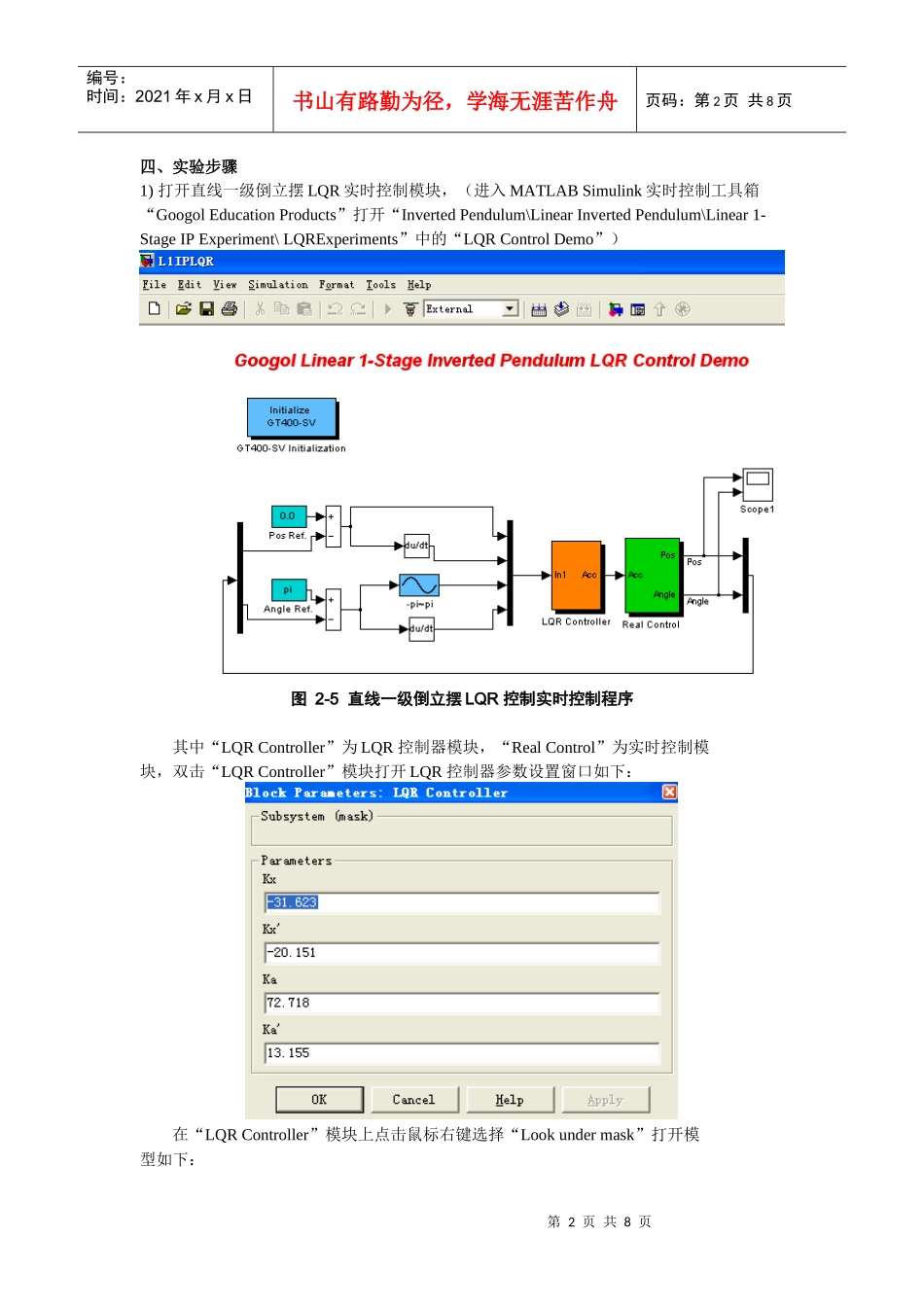
第2页共8页第1页共8页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共8页四、实验步骤1)打开直线一级倒立摆LQR实时控制模块,(进入MATLABSimulink实时控制工具箱“GoogolEducationProducts”打开“InvertedPendulum\LinearInvertedPendulum\Linea