第I页共VIII页自动步行车学生创新实验编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第I页共VIII页机械原理实验项目慧鱼机器人实验一室慧鱼机器人设计实验一、实验目的1)通过对慧鱼机器人、机电产品的系统运动方案的组装设计,培养学生独立确定系统运动方案设计与选型的能力
2)利用“慧鱼模型”组装机器人模型,探索机器人各个功能的实现方法,进行机电一体化方面的训练
二、实验设备1)慧鱼创意组合模型包;2)计算机一台;3)可编程控制器、智能接口板;4)控制软件
三、实验内容“慧鱼创意组合模型”是工程技术型模型,能够实现对工程技术以及机器人技术等的模拟仿真
模型是由各种可以相互拼接的零件所组成,由于模型充分体现了各种结构、动力、控制的组成因素,并设计了相应的模块,因此,可以拼装成各种各样的机器人模型,可以用于检验学生的机械结构和机械创新设计与控制的合理可行性
第II页共VIII页第I页共VIII页全自动焊接生产线搬运机械手编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第II页共VIII页慧鱼机器人实验二室PLC控制实验一、实验目的1)了解全自动加工中心、自动化立体仓库、焊接站等工业模型的组装设计,控制原理及PLC在工业中的应用;2)了解和熟悉PLC的结构和外部接线方法,掌握编程软件的使用方法;3)掌握顺序功能图的绘制,掌握以顺序控制梯形图的设计方法与调试
二、实验设备1)慧鱼工业模型;2)PLC可编程控制器一台;3)PC/PII编程电缆一条;4)安装有编程软件的计算机一台
三、实验内容通过德国慧鱼工业模型模拟工程实际背景的机械设备,了解自动生产流水线的结构、运行模式与操纵大型机械设备技能,掌握综合运用光电传感技术、可编程控制器(PLC)的控制原理与编程方法,培养机电一体化的综合能力
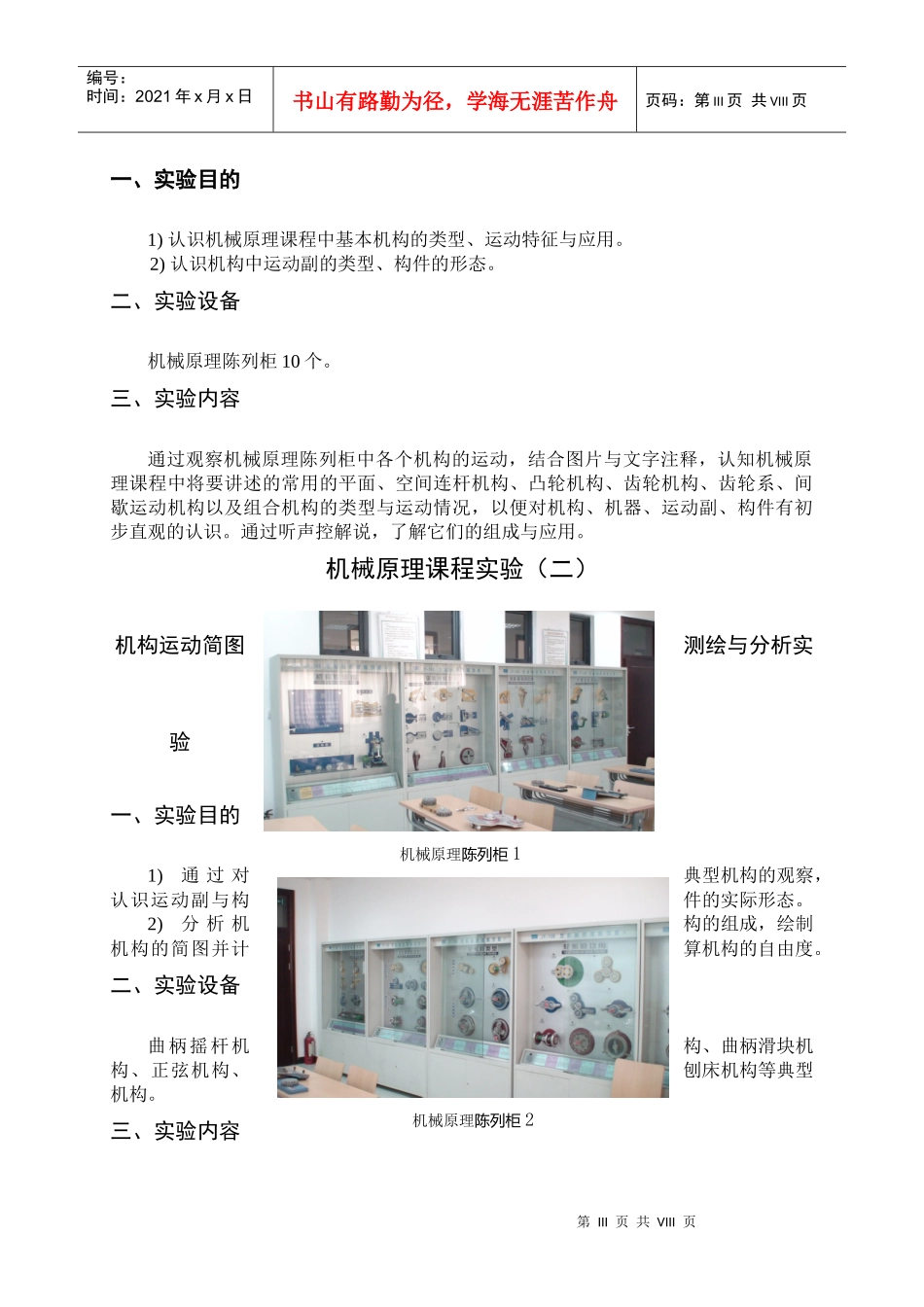
机械原理课程实验(一)机械原理认知实验第III页共VIII页第