1/12基于MATLAB的直流调速数字控制系统的分析和设计电气与信息工程学院自动化13-2马春野2/12基于MATLAB的直流调速数字控制系统的分析和设计摘要:本文简单介绍了直流调速系统数字控制的特点和直流调速系统模型的建立,重点介绍了数字PI控制器和利用Z域根轨迹的设计方法,以及用MATLAB进行了设计过程的仿真和稳定性、动态特性的分析
关键词:直流调速;数字PI控制器;Z域根轨迹法;MATLAB仿真1引言随着计算机技术的发展,直流调速系统的数字化控制已得到广泛应用
较之用传统的用模拟电路实现直流调速系统的触发和调节,数字调节器有着明显的优势
即用微机执行数字PID运算程序代替模拟转速调节器和电流调节器,而转速给定、转速反馈和电流反馈经A/D转换器变成数字量送入微机(或单片机),微机的运算结果通过D/A转换器变成模拟量作为可控整流装置的触发控制电压
这种方式不但克服了电网电压波动对触发精度的影响,而且在一定程度上也减小了因器件老化、网压和温度变化引起的运算误差
由于计算机具有高精度、高速度和编程灵活等优点,可以在系统中灵活的使用各种算法实现最优控制;并且对控制结果的观察更加明确,对控制结果的分析也可以在显示器上绘制曲线来表示[1]
计算机控制系统的经典设计方法一般分为两种
一种是将连续域设计好的控制律D(s)利用不同的离散化方法变换为离散控制律D(z),这种方法称为“连续域—离散化设计”方法,他允许设计师利用熟悉的各种连续域设计方法设计出令人满意的连续域控制器,然后将控制器离散化,离散化过程较为简单
另一种方法是在离散域先建立被控对象的离散模型G(z),然后直接在离散域进行控制器设计
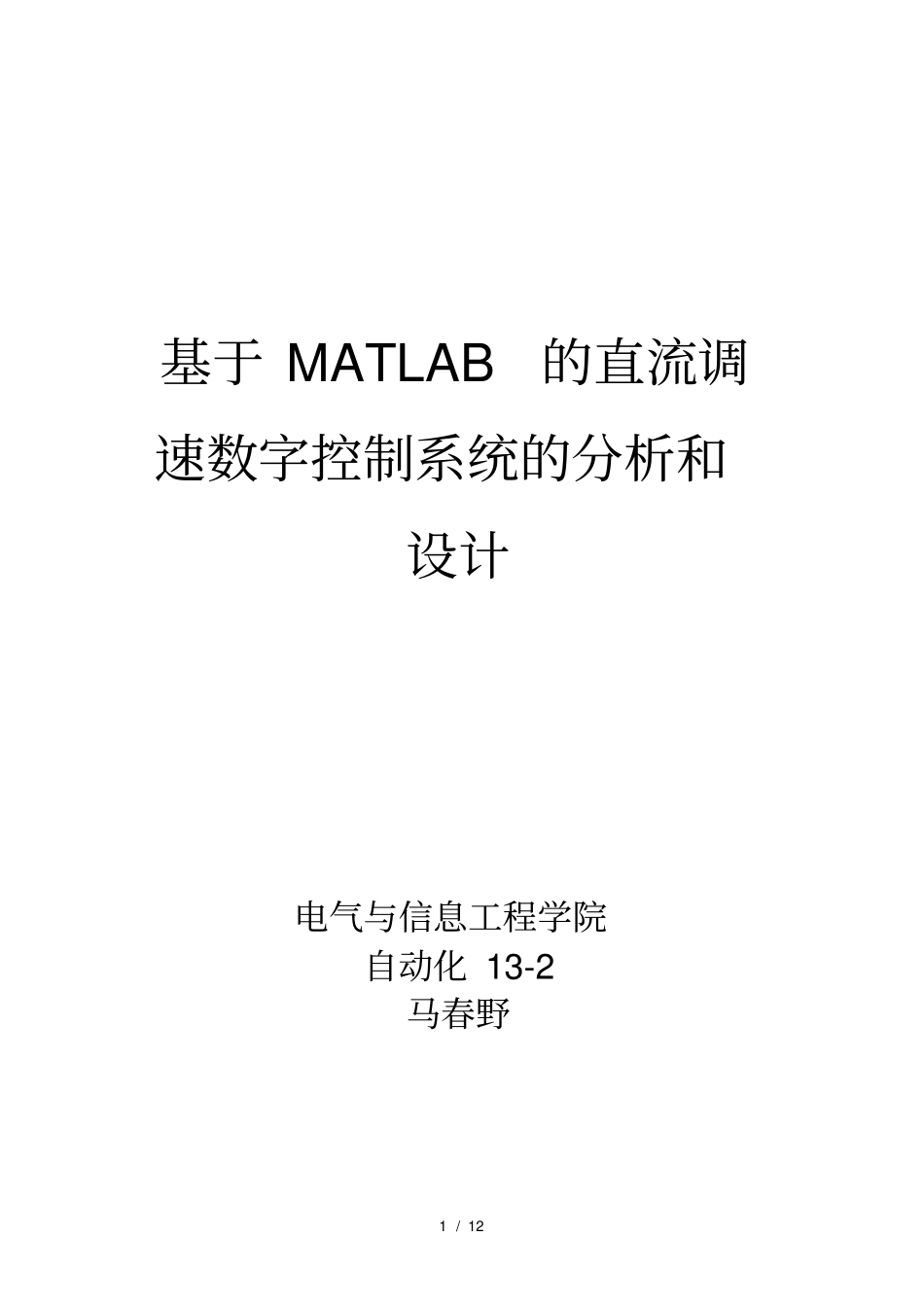
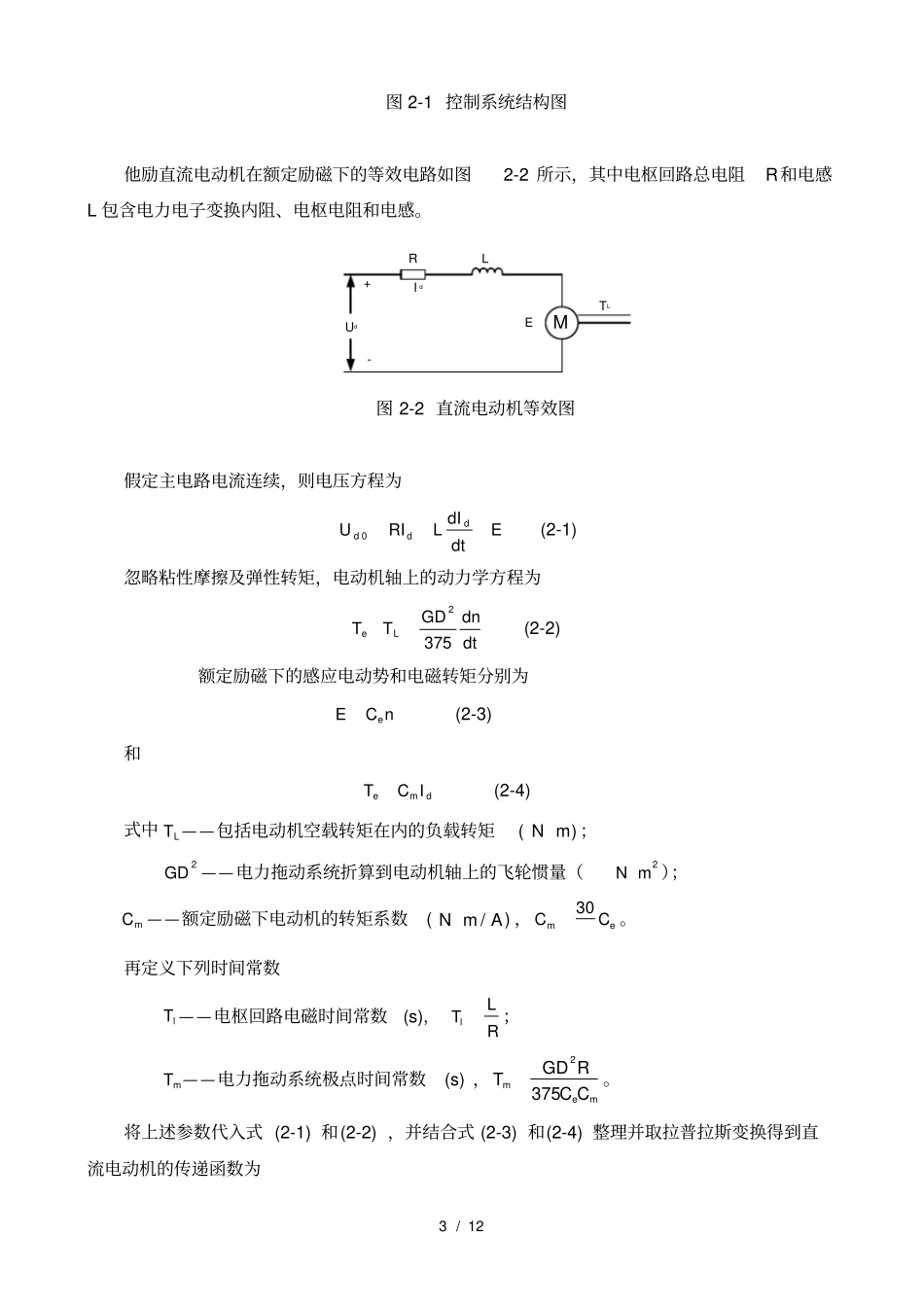
2系统数学模型的建立系统的结构图如图2-1所示数数数数数PWM数数数数数数数数数数数数数数数_3/12图2-1控制系统结构图他励直流电动机在额定励磁下的等效电路如图2-2所示,其中电枢回路总