现代控制理论大作业word
控制系统任务的物理描述为了满足飞机品质的要求,飞机的纵向运动和横侧向运动都需要有能够连续工作的阻尼器,以用来调整飞机的飞行姿态,避免其出现不必要的俯仰和倾斜
维持飞机纵向运动的阻尼器称为俯仰阻尼器,维持飞机横侧向运动的阻尼器称为偏航阻尼器
本次课程大作业旨在通过运用Matlab的经典控制系统设计工具对某型飞机偏航阻尼器进行控制系统的设计
控制系统对象的数学模型巡航状态下,某型飞机侧向运动的状态空间模型为:111121314111222122232421221313233343132234142434441424()1()()()()2()()()3()()4txtaaaabbtxtaaaabbutaaaabbutxttaaaabbxttxxxx
1111213141221222324234()()()()()()xtccccytxtccccytxtxt式中:1()xt:侧滑角(单位为rad)2()xt:偏航角速度(单位为/rads)3()xt:滚转角速度(单位为/rads)4()xt:倾斜角(单位为rad)输入向量及输出向量分别为:1()ut:方向舵偏角(单位为rad)2()ut:副翼偏角(单位为rad)现代控制理论大作业word
1()yt:偏航角速度(单位为/rads)2()yt:倾斜角(单位为rad)设飞机巡航飞行时的速度为0
8马赫,高度为40000英尺,此时模型的参数为:0
055800
598000
031803
050000
4650000
00000A0
007290
475000
007750
1430000B01
0000001
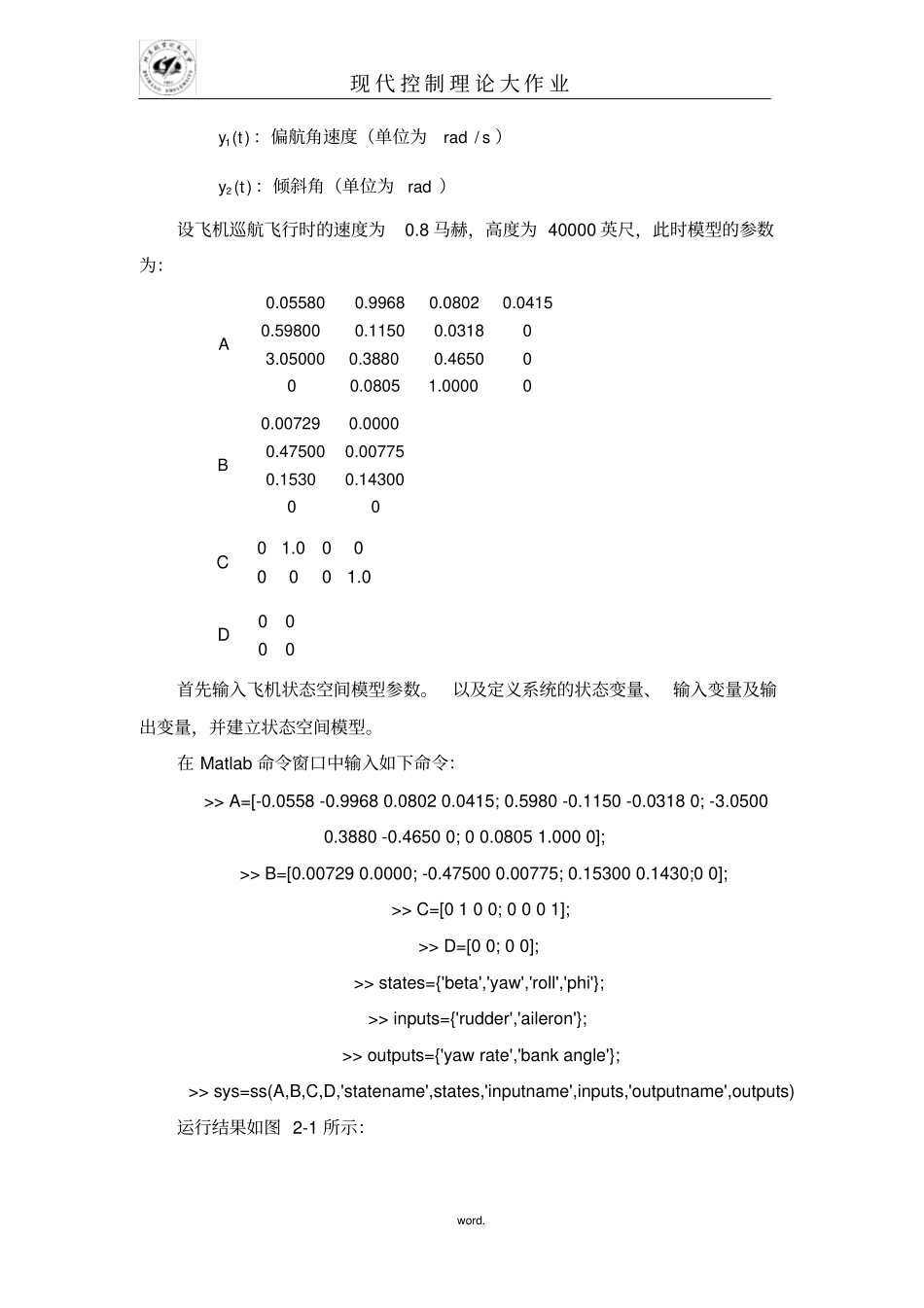
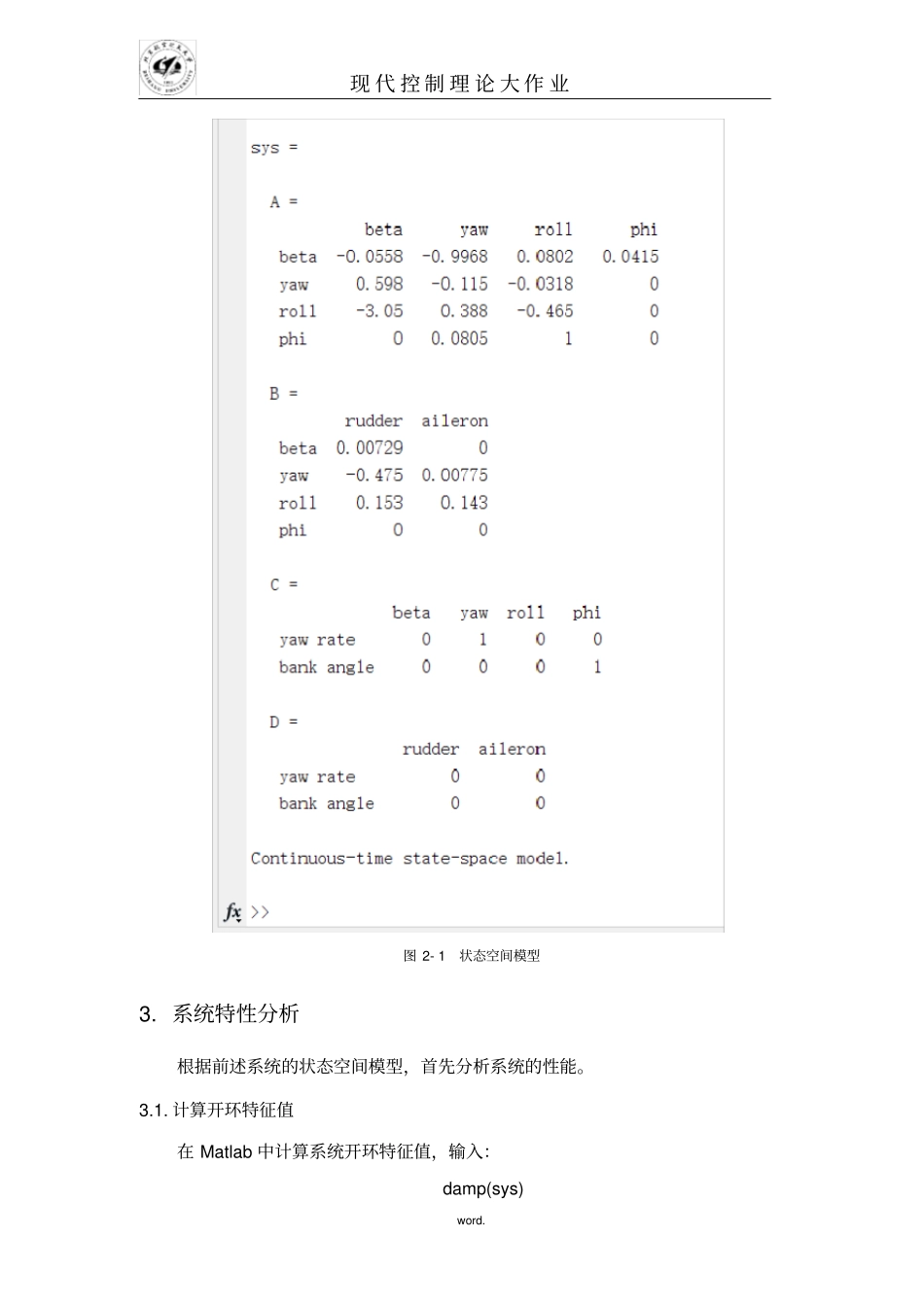
0C0000D首先输入飞机状态空间模型参数
以及定义系统的状态变量、输入变量及输出变量,并