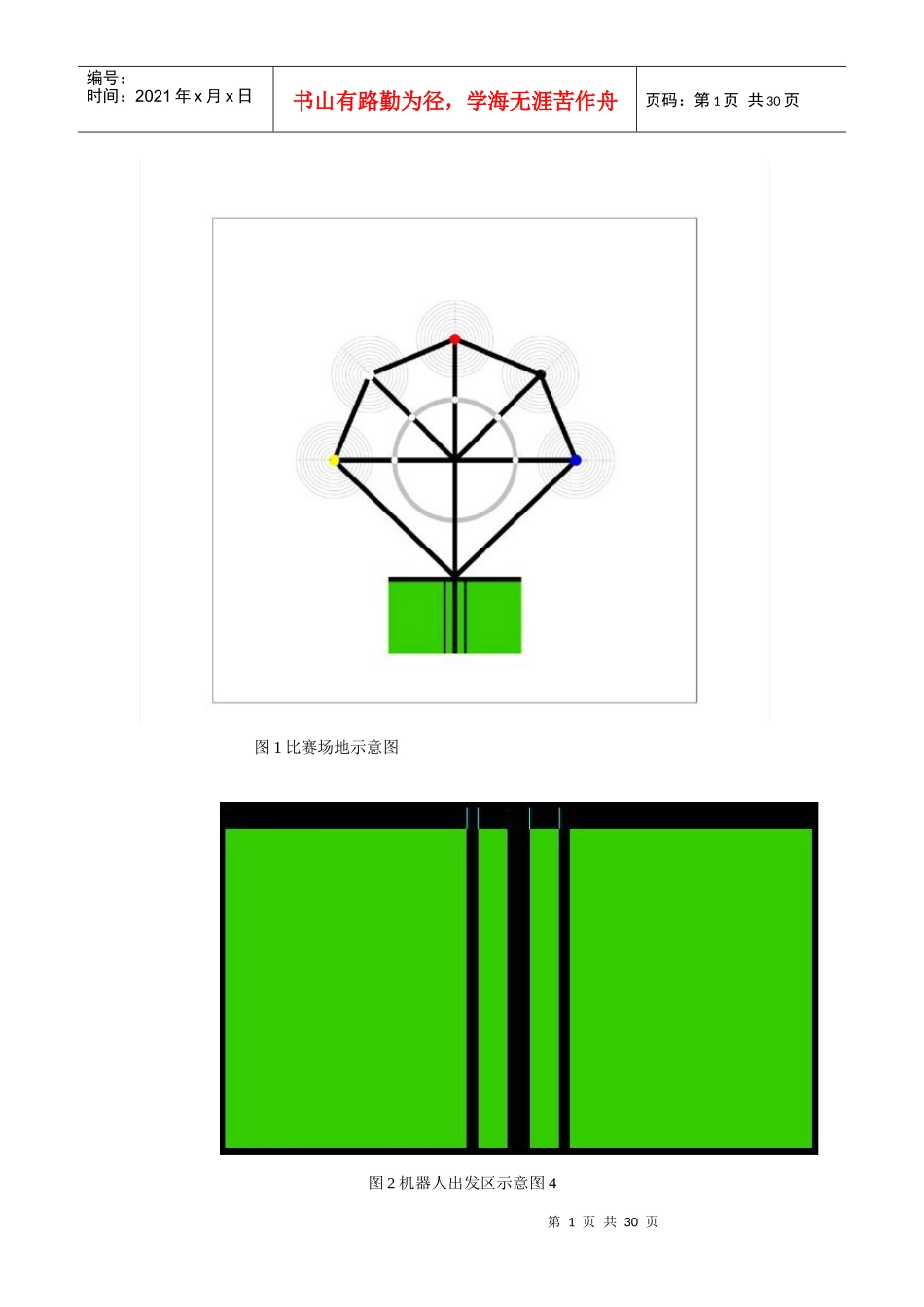
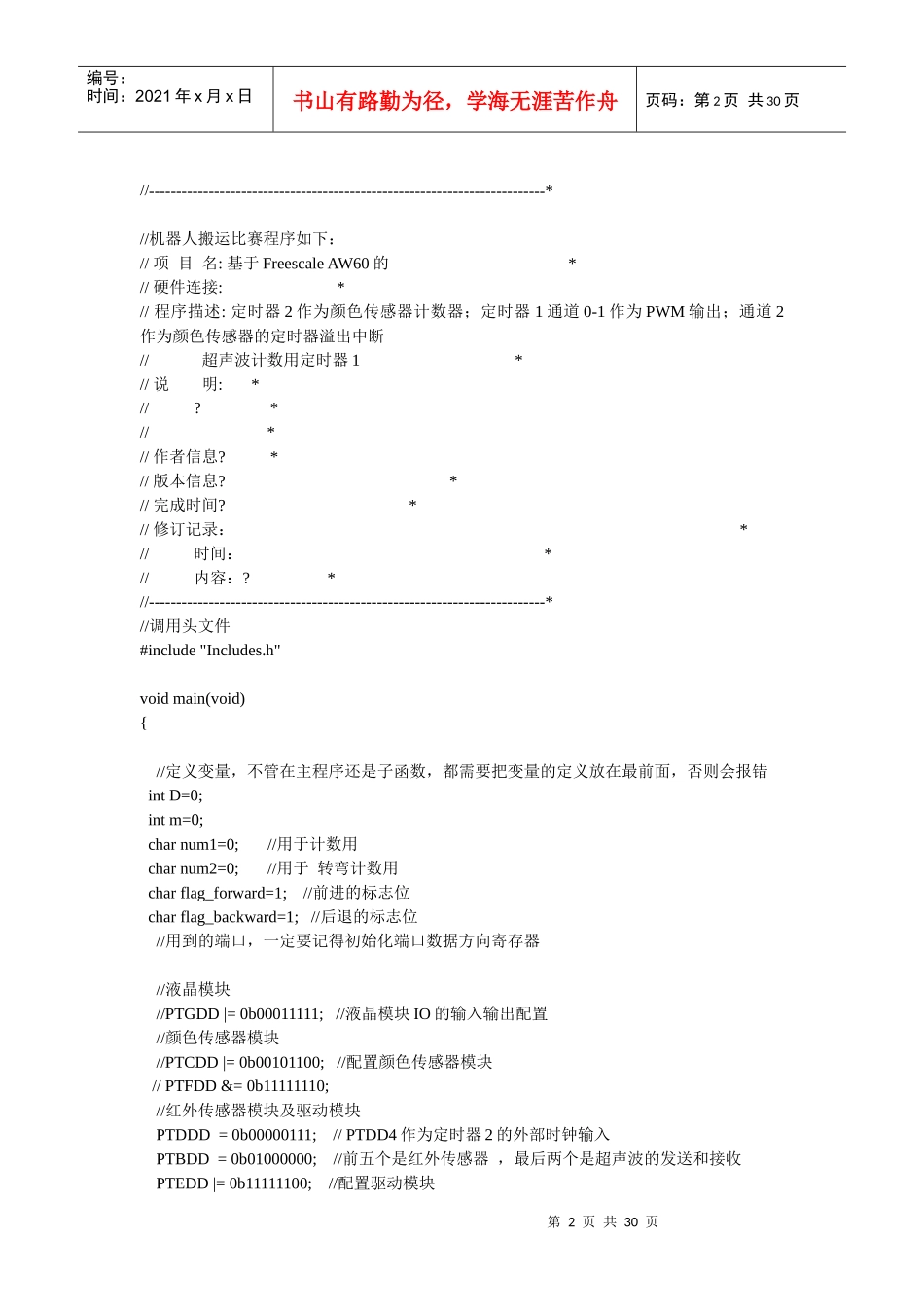
第1页共30页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共30页图1比赛场地示意图图2机器人出发区示意图4第2页共30页第1页共30页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共30页//-------------------------------------------------------------------------*//机器人搬运比赛程序如下://项目名:基于FreescaleAW60的*//硬件连接:*//程序描述:定时器2作为颜色传感器计数器;定时器1通道0-1作为PWM输出;通道2作为颜色传感器的定时器溢出中断//超声波计数用定时器1*//说明:*//
*//*//作者信息
*//版本信息
*//完成时间
*//修订记录:*//时间:*//内容:
*//-------------------------------------------------------------------------*//调用头文件#include"Includes
h"voidmain(void){//定义变量,不管在主程序还是子函数,都需要把变量的定义放在最前面,否则会报错intD=0;intm=0;charnum1=0;//用于计数用charnum2=0;//用于转弯计数用charflag_forward=1;//前进的标志位charflag_backward=1;//后退的标志位//用到的端口,一定要记得初始化端口数据方向寄存器//液晶模块//PTGDD|=0b00011111;//液晶模块IO的输入输出配置//颜色传感器模块//PTCDD|=0b00101100;//配置颜色传感器模块//PTFDD&=0b11111110;//红外传感器模块及驱动模块PTDDD=0b00000111;//PTDD4作