现代控制理论课程设计直线一级倒立摆LQR控制器的设计摘要在控制理论上倒立摆使许多抽象的概念可以直观的表达出来
无论是在实践还是理论上都具有深刻的意义
可以用拉格朗日方法建模,设计倒立摆二次型最优控制器,通过MATLAB仿真和实际系统实验,实现对倒立摆的稳定控制
建立模型,确定参数,进行控制算法设计、系统调试和分析等步骤实现
关键词:二次型;倒立摆;稳定控制前言倒立摆的最初研究开始于20世纪50年代,由美国麻省理工学院的控制论专家根据火箭发射助推器原理设计;而后人们有参照双足机器人控制问题研究出二级倒立摆设备从而提高了检验控制论和方法的能力,也拓宽了检验范围
在控制理论上倒立摆使许多抽象概念如系统稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以直观的表现出来
同时由于倒立摆系统的高阶次、不稳定、多变量非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为研究对象,并不断从中发掘出新的控制理论和控制方法
课程设计要求:熟悉倒立摆实际控制系统;对倒立摆系统建模;进行控制算法设计;进行系统调试和分析;利用MATLAB高级语言编程,实现倒立摆稳定控制;实时输出波形,得出结论
线性二次最优控制LQR基本理论LQR控制器是应用线性二次型最优控制原理设计的控制器
它的任务在于,当系统状态由于任何原因偏离了平衡状态时,能在不消耗过多能量的情况下,保持系统状态各分量仍接近于平衡状态
线性二次型最优控制研究的系统是线性的或可线性化的,并且性能指标是状态变量和控制变量的二次型函数的积分
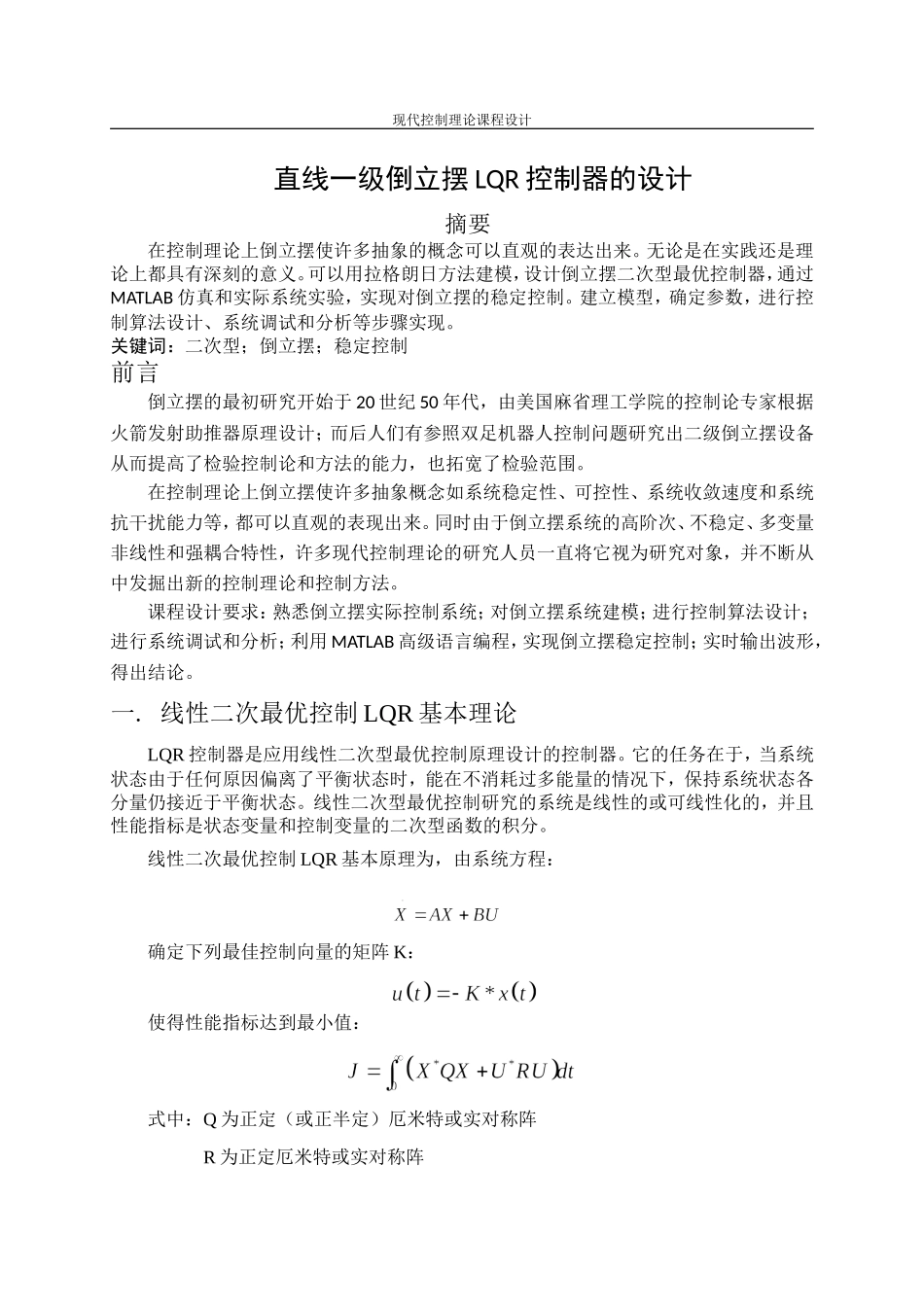
线性二次最优控制LQR基本原理为,由系统方程:确定下列最佳控制向量的矩阵K:使得性能指标达到最小值:式中:Q为正定(或正半定)厄米特或实对称阵R为正定厄米特或实对称阵现代控制理论课程设计下面是最优控制LQR控制原理图:图1LQR控制原理图方程右端第二项是是考虑到控制能量的损耗而引进的,矩阵Q和R确定了