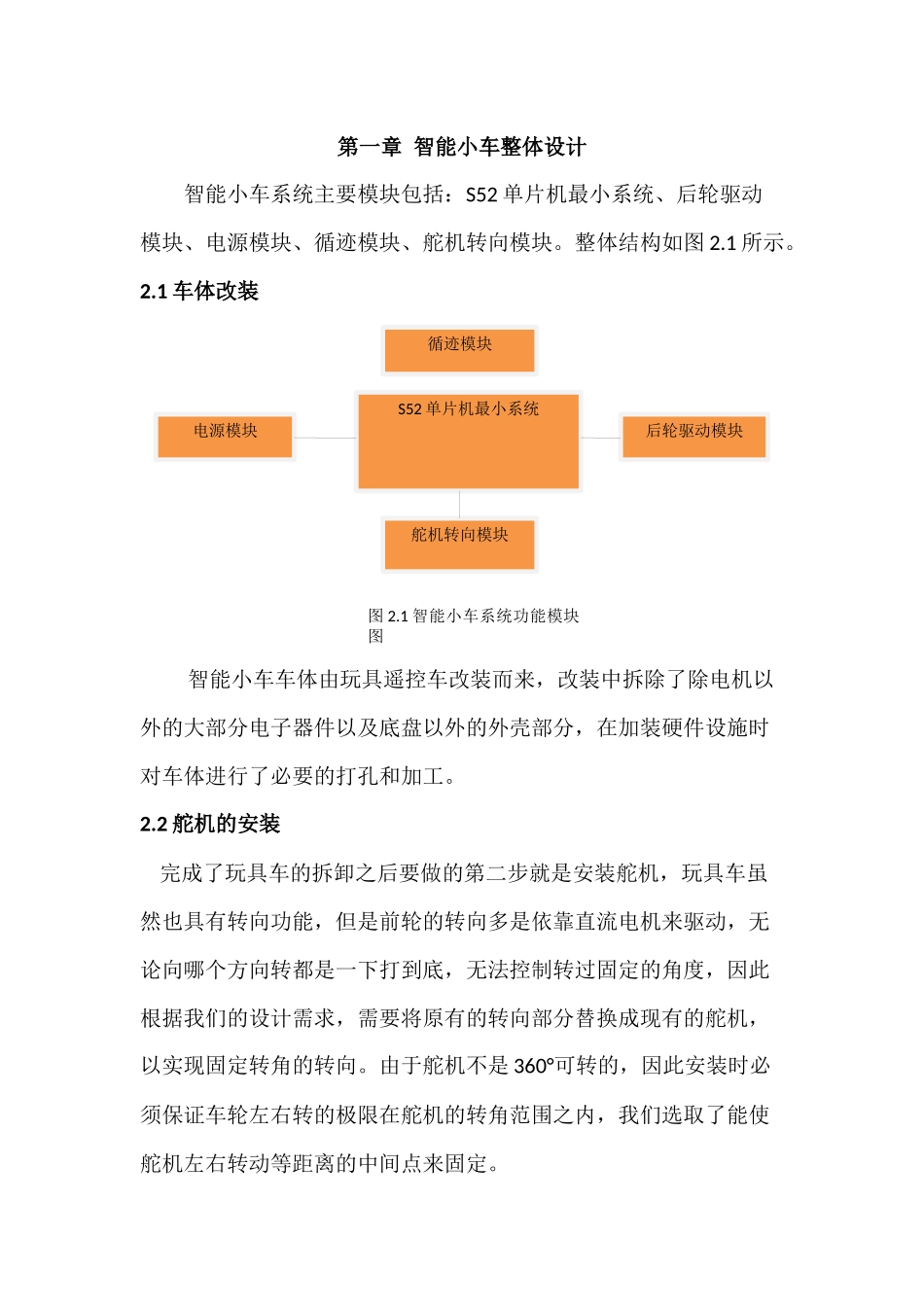
1智能小车系统功能模块图舵机转向模块循迹模块S52单片机最小系统电源模块后轮驱动模块第一章智能小车整体设计智能小车系统主要模块包括:S52单片机最小系统、后轮驱动模块、电源模块、循迹模块、舵机转向模块
整体结构如图2
1车体改装智能小车车体由玩具遥控车改装而来,改装中拆除了除电机以外的大部分电子器件以及底盘以外的外壳部分,在加装硬件设施时对车体进行了必要的打孔和加工
2舵机的安装完成了玩具车的拆卸之后要做的第二步就是安装舵机,玩具车虽然也具有转向功能,但是前轮的转向多是依靠直流电机来驱动,无论向哪个方向转都是一下打到底,无法控制转过固定的角度,因此根据我们的设计需求,需要将原有的转向部分替换成现有的舵机,以实现固定转角的转向
由于舵机不是360°可转的,因此安装时必须保证车轮左右转的极限在舵机的转角范围之内,我们选取了能使舵机左右转动等距离的中间点来固定
3车体整体布局在车体布局中,除了舵机以外我们还加装了最小系统及电源模块电路板、电机驱动模块电路板、循迹模块电路板等硬件部分
在布置安装时,循迹模块电路板用可变形的铁皮固定于车体前端10cm处,最小系统和电源模块融合为一个19cm长11cm宽的电路板安装于小车中部,而电机驱动模块电路板安装于小车尾部
第二章硬件设计2
1电源模块设计在电源模块的设计中,我们考虑到各模块工作电压的需求以及小车的耗电情况,将原装的电池改为了飞思卡尔专用的电池
设计稳压电源时,考虑到电池电压较低,并且在电量损耗时存在电压降低的情况,应此我们采用了低压差的稳压芯片LM2940
在最初的电路原理图设计时,我们采用了三路电源分别供电的方法,一路5V电源专门为最小系统供电,以此避免大电流器件对单片机造成干扰影响单片机稳定运行,另外一路5V电源为电机驱动模块和循迹模块提供工作电压
第三路电源单独为舵机提供5V电源
输入电源电压为7