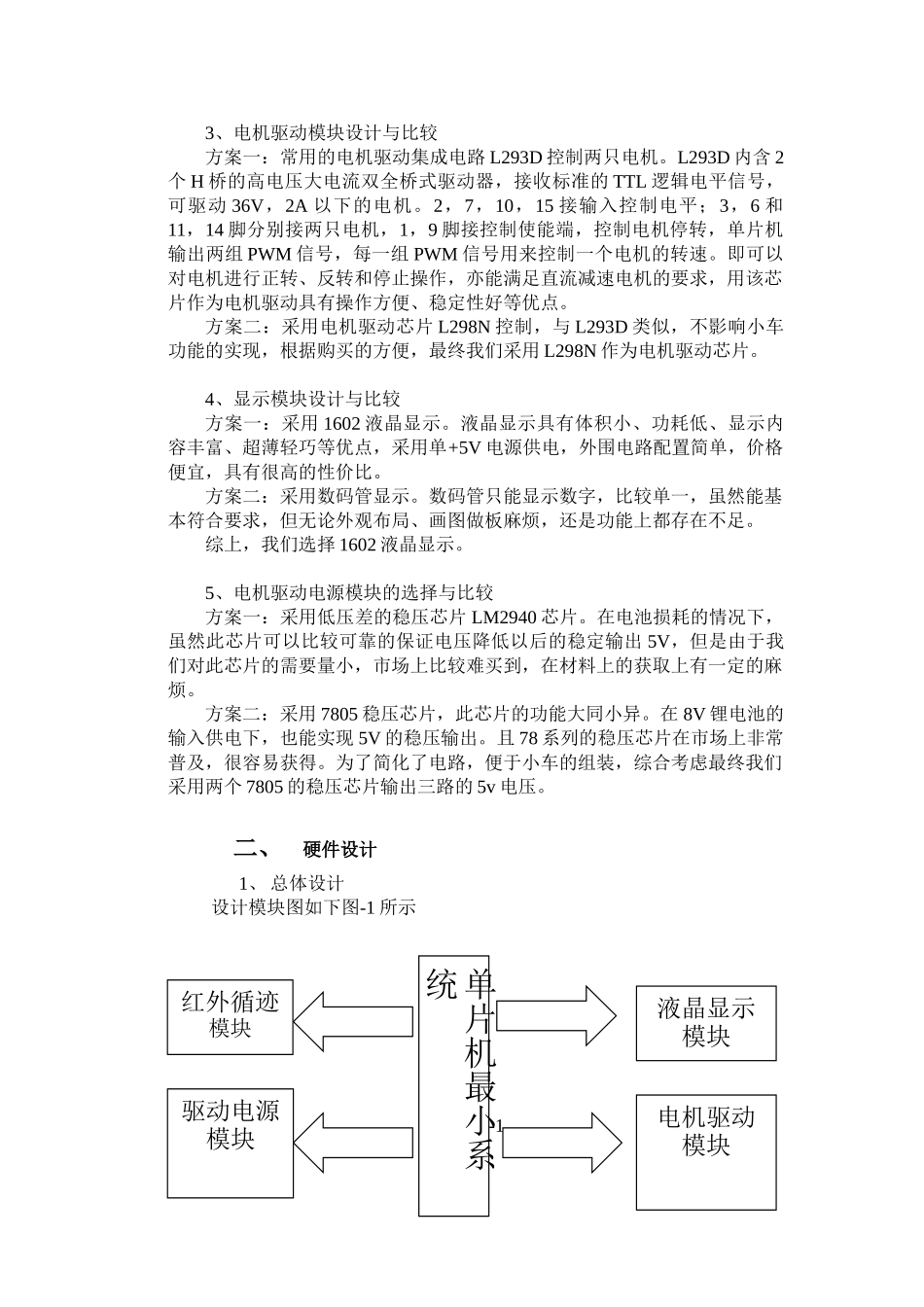
智能循迹小车摘要设计分为五个模块:单片机最小系统、电机驱动电源、电机驱动电路、红外循迹模块、显示模块
电机驱动电路用于转向控制;红外循迹模块利用四个光电管,对黑色轨道进行循迹;电机驱动电源利用两个7805提供三路5v电压,一路供给最小系统,一路供给电机驱动电路,一路供给循迹模块
本设计中为了简化电路,减少小车的负载,利用软件编程的方法控制电机的转速从而控制小车的行驶速度,这是本设计的一大特色
一、方案论证与比较1、轨迹探测模块设计与比较方案一、使用简易光电传感器结合外围电路进行检测由于光电传感器对行驶过程中的稳定性要求非常高,而且容易受到光线环境和路面介质的影响,误测的几率非常大
在使用中极易出现问题,给检测和调试造成很大的困难,容易因为检测的失误导致整个系统的不正常工作,所以最终并未采用此方案
方案二、使用两只stl198光电管把两只光电管分别排列在黑色轨迹的两侧,根据其接收反射光的多少输出高低电平来控制小车的转向,以达到循迹的目的
但是调试表明,如果两只开关的距离很小,则以约束了小车的速度来达到检测轨迹的目的,如果两只开关的距离太大,则同时传来同一电平信号的几率很大,容易使小车的行驶路线偏离轨道,达不到循迹的目的
方案三、使用四只stl198光电管分左右两边各两只光电管一排排列,里面的两个距离靠的较远,外面的两个靠的比较近
当小车脱离轨道时即里面的两个光电管中有一个或者两个都偏离了轨道,等待外面的那两个光电管的任何一个检测到黑线时,做出相应的转向调整
直到中间的两个开关管的任何一个检测到黑线为止(即回到轨道上)再恢复正向行驶
现场调试表明,小车在行驶中虽然出现摇摆(各个光电管间的距离达到1厘米),但是基本上能准确地达到循迹目的
综合考虑实际中光电管的安装,考虑小车的行驶速度和循迹准确性,我们最终选择了方案三
2、单片机最小系统控制模块设计与比较方案一:采用MSP430系