PID在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器
它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点;而且在理论上可以证明,对于过程控制的典型对象──“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,PID控制器是一种最优控制
PID调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活(PI、PD、…)
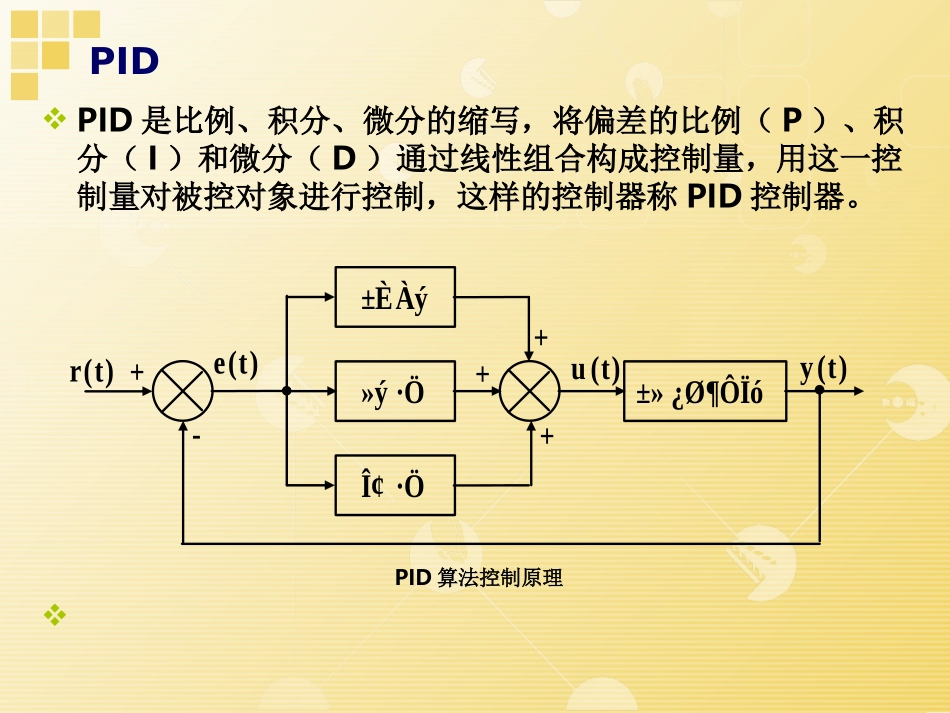
PIDPID是比例、积分、微分的缩写,将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,用这一控制量对被控对象进行控制,这样的控制器称PID控制器
PID算法控制原理±ÈÀý»ý·Ö΢·Ö±»¿Ø¶ÔÏór(t)++-e(t)++u(t)y(t)PID调节器的优点PID调节器之所以经久不衰,主要有以下优点
技术成熟2
易被人们熟悉和掌握3
不需要建立数学模型4
控制效果好PID调节器的类型1
比例调节器2
比例积分调节器3
比例微分调节器4
比例积分微分调节器1
比例调节器比例调节器方程为:y=KPe(t)(1)式中:y为调节器输出;Kp为比例系数;e(t)为调节器输入偏差
由上式可以看出,调节器的输出与输入偏差成正比
因此,只要偏差出现,就能及时地产生与之成比例的调节作用,具有调节及时的特点
比例调节器的特性曲线,如图1所示
比例调节器图1阶跃响应特性曲线e(t)y00ttKPe(t)2
积分调节器所谓积分作用是指调节器的输出与输入偏差的积分成比例的作用
积分方程为:(2)式中:TI是积分时间常数,它表示积分速度的大小,TI越大,积分速度越慢,积分作用越弱
积分作用的响应特性曲线,如图2所示
积分调节器图2积分作用响应曲线e(t)y00tt比例积分调节器若将比例和积