1Delta并联机器人本体与控制柜1
控制系统设计在前面机械系统的基础上,要想实现机器人的抓取操作,还必须有控制系统1
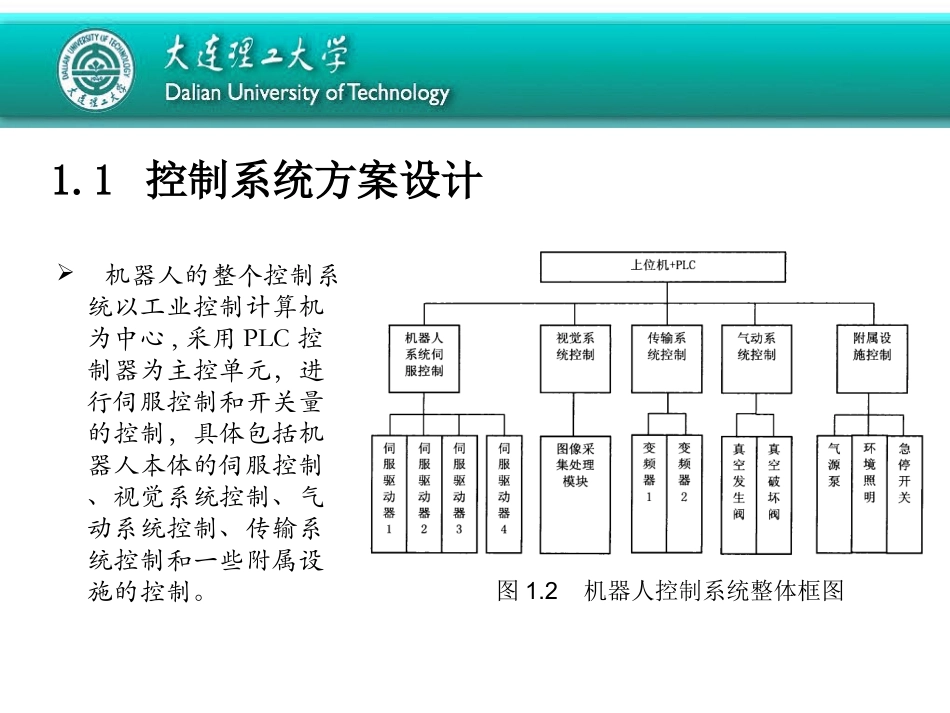
1控制系统方案设计机器人的整个控制系统以工业控制计算机为中心,采用PLC控制器为主控单元,进行伺服控制和开关量的控制,具体包括机器人本体的伺服控制、视觉系统控制、气动系统控制、传输系统控制和一些附属设施的控制
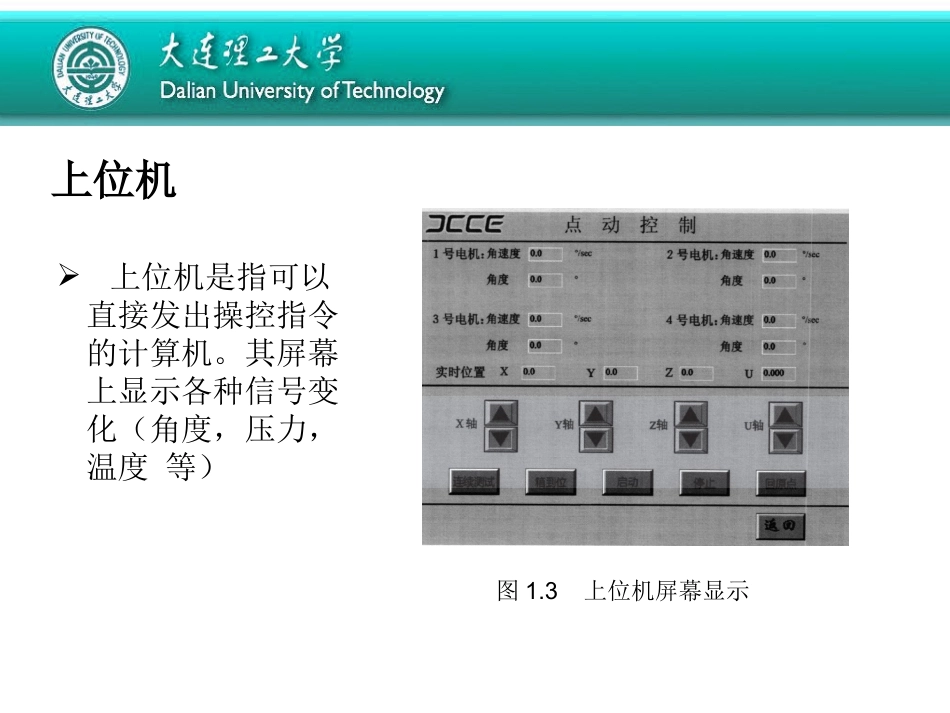
2机器人控制系统整体框图上位机上位机是指可以直接发出操控指令的计算机
其屏幕上显示各种信号变化(角度,压力,温度等)图1
3上位机屏幕显示图1
4机器人系统及视觉系统示意图机器人视觉系统机器视觉系统大多是指通过机器视觉产品(即图像摄取装置,分CCD和CMOS两种)把图像抓取到,然后将该图像传送至处理单元,通过数字化处理,根据像素分布和亮度、颜色等信息,来进行尺寸、形状、颜色等的判别
进而根据判别的结果来控制现场的设备动作
气动系统设计方案如右图所示,气源泵(空气泵)产生压缩气体,经过滤减压阀过滤、定压,分为两支路,一路气体通过真空发生电磁阀到达真空发生器用于产生真空;另一路气体经过真空破坏电磁阀直接与吸盘相通
两个电磁阀的通断信号来自控制器的开关量信号,当吸盘到达待抓取物体的正上方时,真空发生电磁阀打开,真空发生器产生真空,吸盘将物体吸住;到达放置位置时,真空破坏电磁阀打开,吸盘气压高于大气压,物体被“放下”
气动系统设计传输系统传输系统主要是电机和两条传送带,当机器人运行时,控制器给出使能信号使电机带动传送带运动,另外,传送带上装有编码器,将传送带的速度实时反馈给控制器
附属设施的控制包括气源泵、夜间工作照明、急停开关、状态指示灯等开关量的控制
附属设施控制1
2控制系统主要硬件配置高速拾取并联机器人控制系统的硬件主要有上位机、PLC控制器、交流伺服电机等
(1)上位机
上位机主要是提供友好的人机交互,从而间接的实现对控制