第5章轮系5
1定轴轮系5
2周转轮系5
3混合轮系5
4轮系的功用习题5
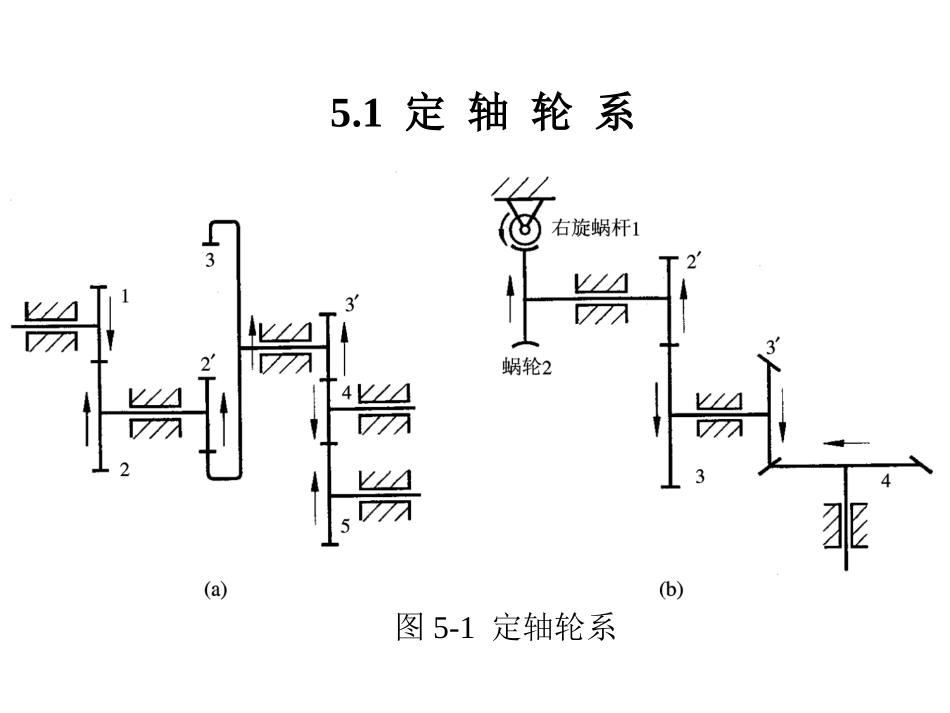
1定轴轮系图5-1定轴轮系5
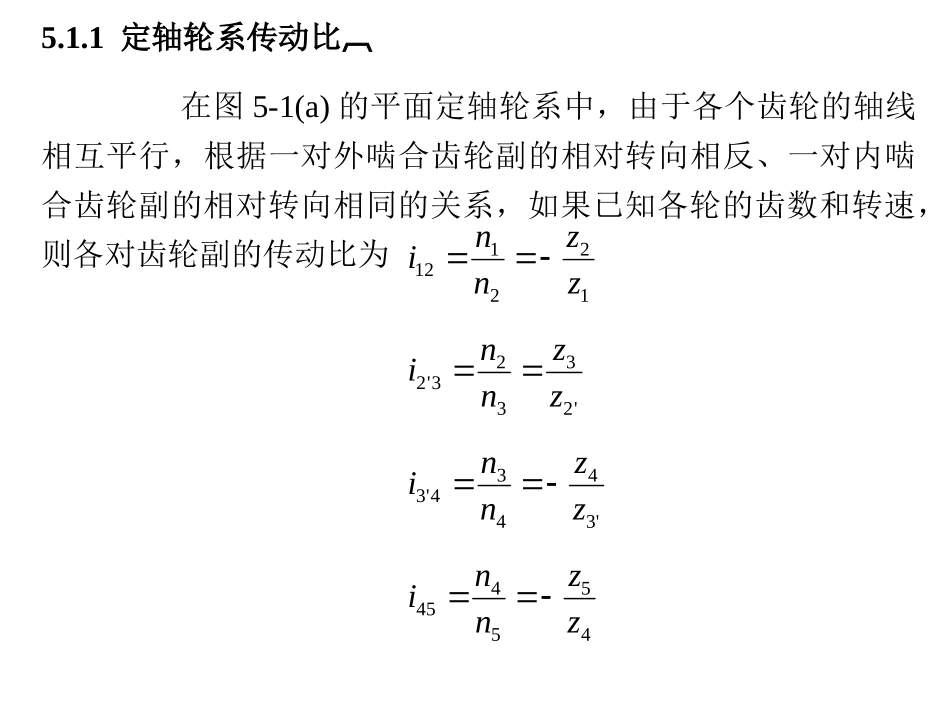
1定轴轮系传动比在图5-1(a)的平面定轴轮系中,由于各个齿轮的轴线相互平行,根据一对外啮合齿轮副的相对转向相反、一对内啮合齿轮副的相对转向相同的关系,如果已知各轮的齿数和转速,则各对齿轮副的传动比为455445'34434'3'23323'2122112zznnizznnizznnizznni将以上各式等号两边连乘后得4'3'215432354324321454'33'212)1(zzzzzzzznnnnnnnniiii因此'3'215325115zzzzzznni由上可知,定轴轮系首、末两轮的传动比等于组成轮系的各对齿轮传动比的连乘积,其大小等于所有从动轮齿数的连乘积与所有主动轮齿数的连乘积之比,其正负号则取决于外啮合的次数
传动比为正号时表示首、末两轮的转向相同,为负号时表示首、末两轮的转向相反
假设定轴轮系首末两轮的转速分别为nF和nL,则传动比的一般表达式是乘积之间所有主动轮齿数连到从乘积之间所有从动轮齿数连到从LFLFnnimLFFL)1((5-1)式中:m——轮系从齿轮F到齿轮L的外啮合次数
nF和nL(r/min)都是代数量(既有大小,又有方向)
在图5-1(a)的定轴轮系中,齿轮4与齿轮3′和5同时啮合
齿轮4和3′啮合时,它为从动轮,和5啮合时,它为主动轮,因此在计算公式的分子和分母中都出现齿数z4,而互相抵消,说明齿轮4的齿数不影响传动比的大小
但是由于它的存在而增加了一次外啮合,改变了轮系末轮的转向
这种齿轮称为惰轮
2定轴轮系传动比符号的确定方法(1)对于图5-1(a)所示的平面定