机械设计基础试题库一、判断(每题一分)1、一部机器可以只含有一个机构,也可以由数个机构组成
……(√)2、机器的传动部分是完成机器预定的动作,通常处于整个传动的终端
(×)4、机构是具有确定相对运动的构件组合
………………………………(√)5、构件可以由一个零件组成,也可以由几个零件组成
………………(√)6、整体式连杆是最小的制造单元,所以它是零件而不是构件
……(×)7、连杆是一个构件,也是一个零件
………………………(√)二、选择(每题一分)1、组成机器的运动单元体是什么
(B)A.机构B.构件C.部件D.零件2、机器与机构的本质区别是什么
(A)A.是否能完成有用的机械功或转换机械能B.是否由许多构件组合而成C.各构件间能否产生相对运动D.两者没有区别3、下列哪一点是构件概念的正确表述
(D)A.构件是机器零件组合而成的
B.构件是机器的装配单元C.构件是机器的制造单元D.构件是机器的运动单元5、以下不属于机器的工作部分的是(D)A.数控机床的刀架B.工业机器人的手臂C.汽车的轮子D.空气压缩机三、填空(每空一分)1、根据功能,一台完整的机器是由(动力系统)、(执行系统)、(传动系统)、(操作控制系统)四部分组成的
车床上的主轴属于(执行)部分
3、机械中制造的单元称为(零件),运动的单元称为(构件),装配的单元称为(机构)
4、从(运动)观点看,机器和机构并无区别,工程上统称为(机械)
2平面机构一、填空题(每空一分)2
两构件之间以线接触所组成的平面运动副,称为高副,它产生1个约束,而保留2个自由度
机构具有确定的相对运动条件是原动件数等于机构的自由度
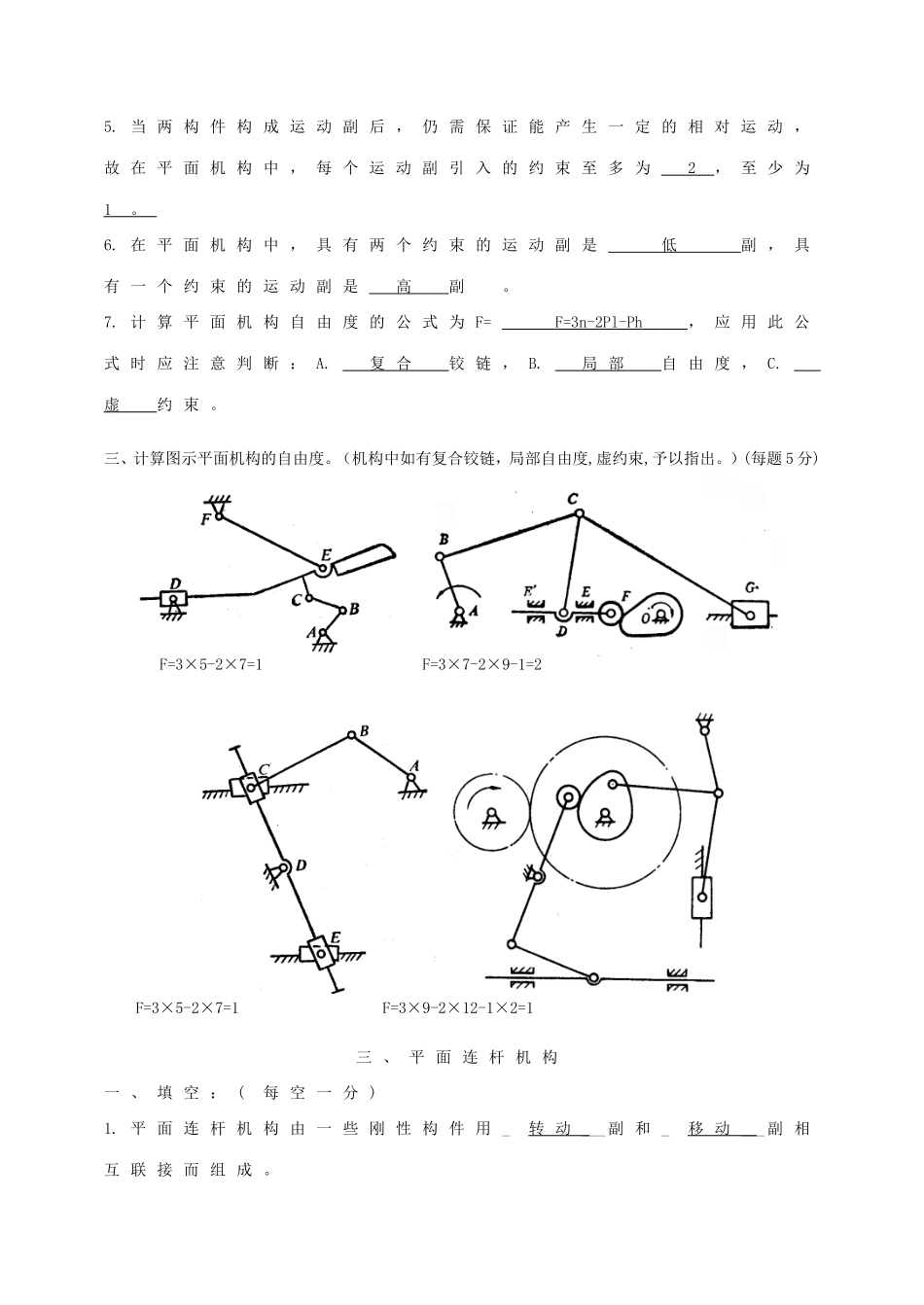
在平面机构中若引入一个高副将引入___1__个约束,而引入一个低副将引入_2___个约束,构件数、约束数与机构自由度的关系是F=3n-2Pl-Ph
当两构件构成运动副后,仍需保证能产生一定的相对运动,