(第二届中南民族)10
3整体策略分析在确定的赛道上,对于机械确定的车辆,总有一个理论的最高速度
能否接近这个速度就取决于控制策略的好坏
采用直线高速弯道低速还是直线、弯道都采用中速,在不同的赛道上可能各有优点
与其采用一个适应各种赛道的控制策略不如使用拨码开关,根据现场不同的情况来人为调节不同的策略
1急弯急弯在这里指半径65cm以下,圆弧超过90度的弯道
急弯是限制智能车速度的主要因素
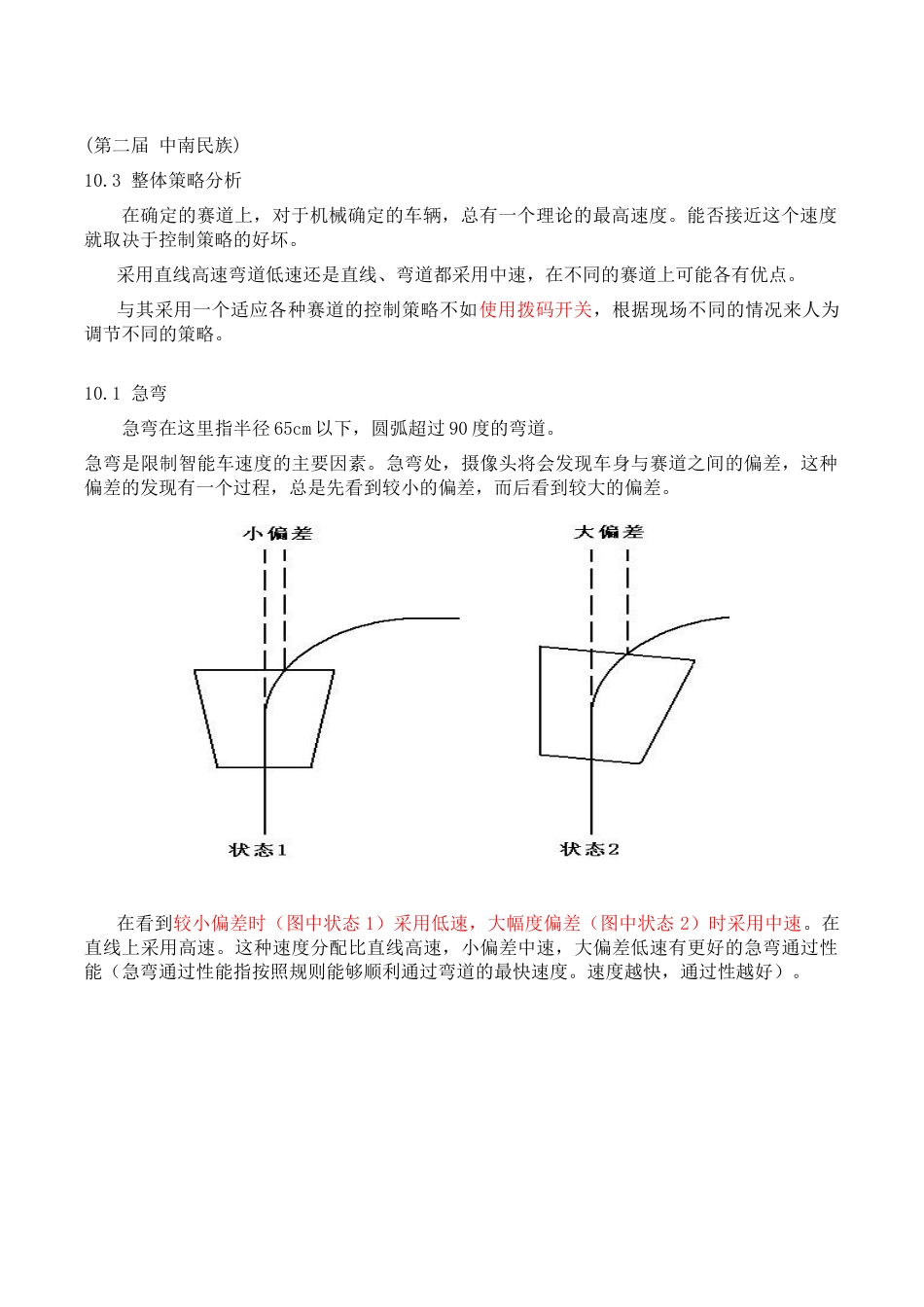
急弯处,摄像头将会发现车身与赛道之间的偏差,这种偏差的发现有一个过程,总是先看到较小的偏差,而后看到较大的偏差
在看到较小偏差时(图中状态1)采用低速,大幅度偏差(图中状态2)时采用中速
在直线上采用高速
这种速度分配比直线高速,小偏差中速,大偏差低速有更好的急弯通过性能(急弯通过性能指按照规则能够顺利通过弯道的最快速度
速度越快,通过性越好)
2小蛇形弯小蛇形弯指圆弧切点与中心线之间的距离小于8cm的弯道
目的是在小蛇形弯道直线通过
采用区间加权平均的办法处理蛇形弯
区间指只有偏差在设定的范围以内才作加权平均处理
使用九行数据作加权平均
实际加权平均的效果由于摄像头可视范围的限制,并不是很明显
能够直线行驶快速通过蛇形弯道是因为,在区间范围以内将伺服电机的转动角度给的很小
在实际的测试中,对于偏差大于10cm的蛇形弯就不会当作直线来处理了
(第三届武汉科技首安)4
2转角的控制对于舵机的控制,我们采用开环控制,由于舵机的控制精度高,一个PWM占空比对应一个角度,因此开环控制的效果较好
我们采用的是PD控制,因为这样可以让舵机的控制速度更快,输入黑线位置和黑线位置的变化率,通过分段比例控制输出相应的PWM值
因为小车处于弯道和直道的转向模型不同,统一的比例带过大会导致小车振荡,过小导致最大控制量偏小,小车转向不足,过弯时冲出赛道
使用分段比例控制既方便又可以解决以