农业系统工程(2006)95(1),35—412006
007功率和机械马铃薯种植的行为评估1
农场科技集团,瓦赫宁根大学,荷兰;或电邮联系作者:Willem
克朗有限公司,海因里希·克朗大街10,48480场,德国
农业工程霍恩海姆大学研究所,D-70593德国斯图加特
(收稿2005年5月27日,经修订2006年6月20日受理,网上公布2006年8月2日)大部分马铃薯的种植原理是基于马铃薯种植位置,由一个杯形带传送
这个过程的工作效率是相当低的,由于播种精度要保持在在可接受的范围之内
这主要受限于杯形皮带的速度和杯的数量和定位
这是一种假设的种植距离,也就是统一的种植株距的误差,主要是由杯形带播种机的结构决定
为了确定马铃薯播种位置均匀性偏差的由来需要建立一套理论模型
该模型可以计算每个连续的马铃薯接触地面之间的时间间隔
参考该模型的结果,两个假设均成立:相对于传送带的速度的影响,和相对于马铃薯形状的影响
播种机结构单元安装在一个实验室来验证这两个假设
一个高速相机是用来测量每个连续土豆之间刚好到达土壤表面的时间间隔,以可视化形式表现出马铃薯的位移
结果表明:(1)较高的杯形皮带的速度,更均匀的在播种土豆;(2较普通马铃薯形状并没有带来更高的播种精度
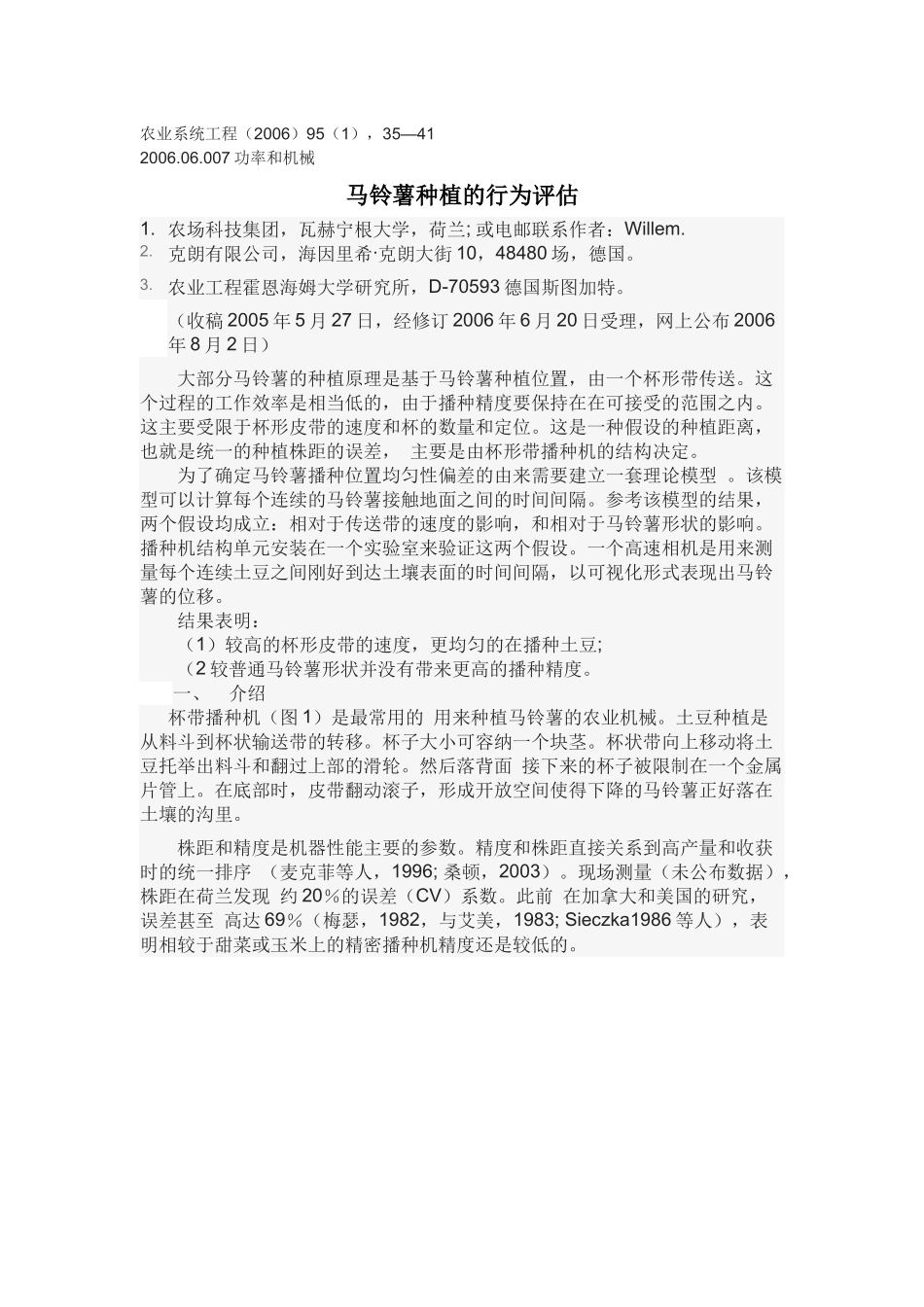
一、介绍杯带播种机(图1)是最常用的用来种植马铃薯的农业机械
土豆种植是从料斗到杯状输送带的转移
杯子大小可容纳一个块茎
杯状带向上移动将土豆托举出料斗和翻过上部的滑轮
然后落背面接下来的杯子被限制在一个金属片管上
在底部时,皮带翻动滚子,形成开放空间使得下降的马铃薯正好落在土壤的沟里
株距和精度是机器性能主要的参数
精度和株距直接关系到高产量和收获时的统一排序(麦克菲等人,1996;桑顿,2003)
现场测量(未公布数据),株距在荷兰发现约20%的误差(CV)系数
此前在加拿大和美国的研究,误差甚至高达69