2007年2月农业机械学报第38卷第2期基于机器视觉的麦田边界检测张磊王书茂陈兵旗祝青园【摘要】针对不同时期麦田场景,提出了基于机器视觉的边界(田埂)检测算法
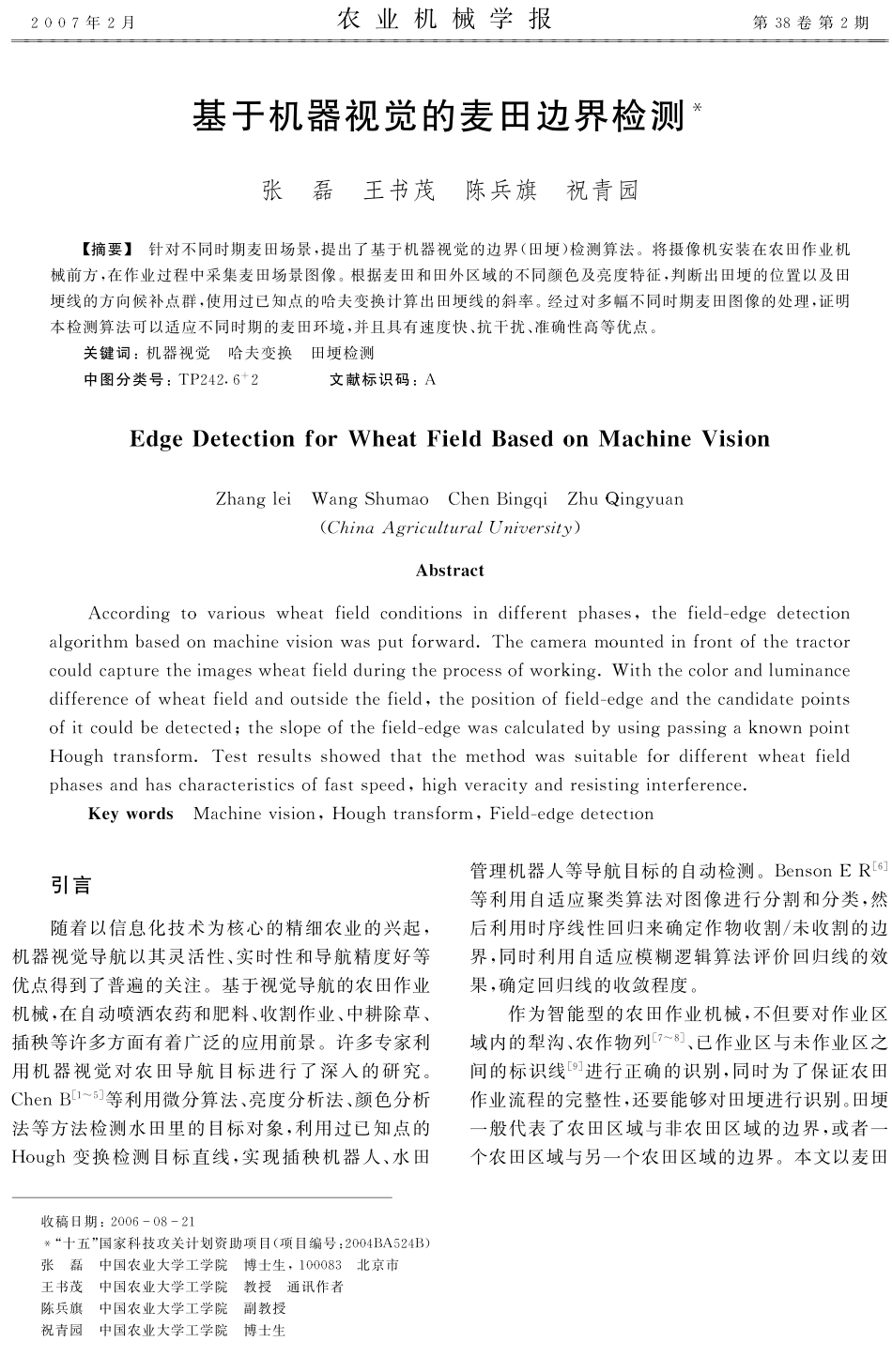
将摄像机安装在农田作业机械前方,在作业过程中采集麦田场景图像
根据麦田和田外区域的不同颜色及亮度特征,判断出田埂的位置以及田埂线的方向候补点群,使用过已知点的哈夫变换计算出田埂线的斜率
经过对多幅不同时期麦田图像的处理,证明本检测算法可以适应不同时期的麦田环境,并且具有速度快、抗干扰、准确性高等优点
关键词:机器视觉哈夫变换田埂检测中图分类号:TP2426+2文献标识码:A﹦﹥┉┉┄┃┄┇〇┉﹨━﹣┈┄┃┃┈┄┃ZhangleiWangShumaoChenBingqiZhuQingyuan(爞牎牏牕牃爛牋牜牏牅牣牓牠牣牜牃牓爺牕牏牤牉牜牞牏牠牪)﹢┈┉┇┉Accordingtovariouswheatfieldconditionsindifferentphases,thefieldedgedetectionalgorithmbasedonmachinevisionwasputforward.Thecameramountedinfrontofthetractorcouldcapturetheimageswheatfieldduringtheprocessofworking.Withthecolorandluminancedifferenceofwheatfieldandoutsidethefield,thepositionoffieldedgeandthecandidatepointsofitcouldbedetected;theslopeofthefieldedgewascalculatedbyusingpassingaknownpointHough