基于模糊神经自适应的感应电动机直接转矩控制研究第2章感应电动机的数学模型感应电动机(又称为异步电动机)的数学模型[341[351是一个高阶、非线性、强祸合的多变量系统
在研究异步电动机的多变量数学模型时,常作如下的假设:(1)忽略空间谐波;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的;(3)忽略铁芯损耗;(4)不考虑频率和温度变化对绕组电阻的影响
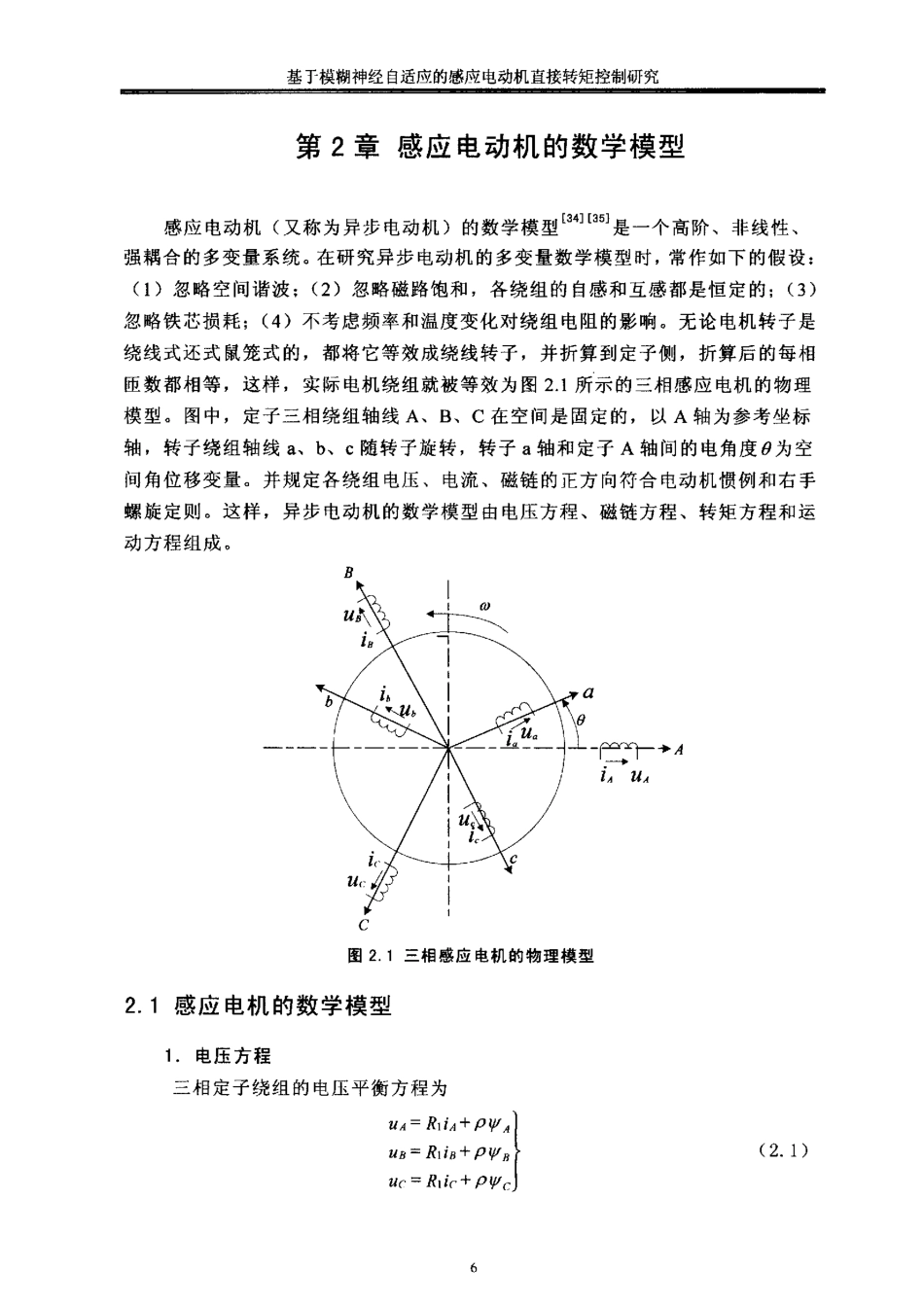
无论电机转子是绕线式还式鼠笼式的,都将它等效成绕线转子,并折算到定子侧,折算后的每相匝数都相等,这样,实际电机绕组就被等效为图2
1所示的三相感应电机的物理模型
图中,定子三相绕组轴线A,B,C在空间是固定的,以A轴为参考坐标轴,转子绕组轴线a,b,c随转子旋转,转子a轴和定子A轴间的电角度B为空间角位移变量
并规定各绕组电压、电流、磁链的正方向符合电动机惯例和右手螺旋定则
这样,异步电动机的数学模型由电压方程、磁链方程、转矩方程和运动方程组成
1三相感应电机的物理模型2
1感应电机的数学模型1
电压方程三相定子绕组的电压平衡方程为uA=RJA+P树,uB=RiiB+P样Buc=R,ic+P俨‘(2
1)硕士学位论文其中p=d/dt;相应的,三相转子绕组折算到定子侧后的电压方程为ua=R2ia+P尹
ua=R2ib+PWh“
+Pyr,(2
,,uc,ua,ub,
表示定子和转子相电压的瞬时值iA,is,is,is,is,i
表示定子和转子相电流的瞬时值;WA'WB>we,wn>wb,w
表示各相绕组的全磁链;R1,R,表示定子和转子绕组电阻
上述各量都己折算到定子侧
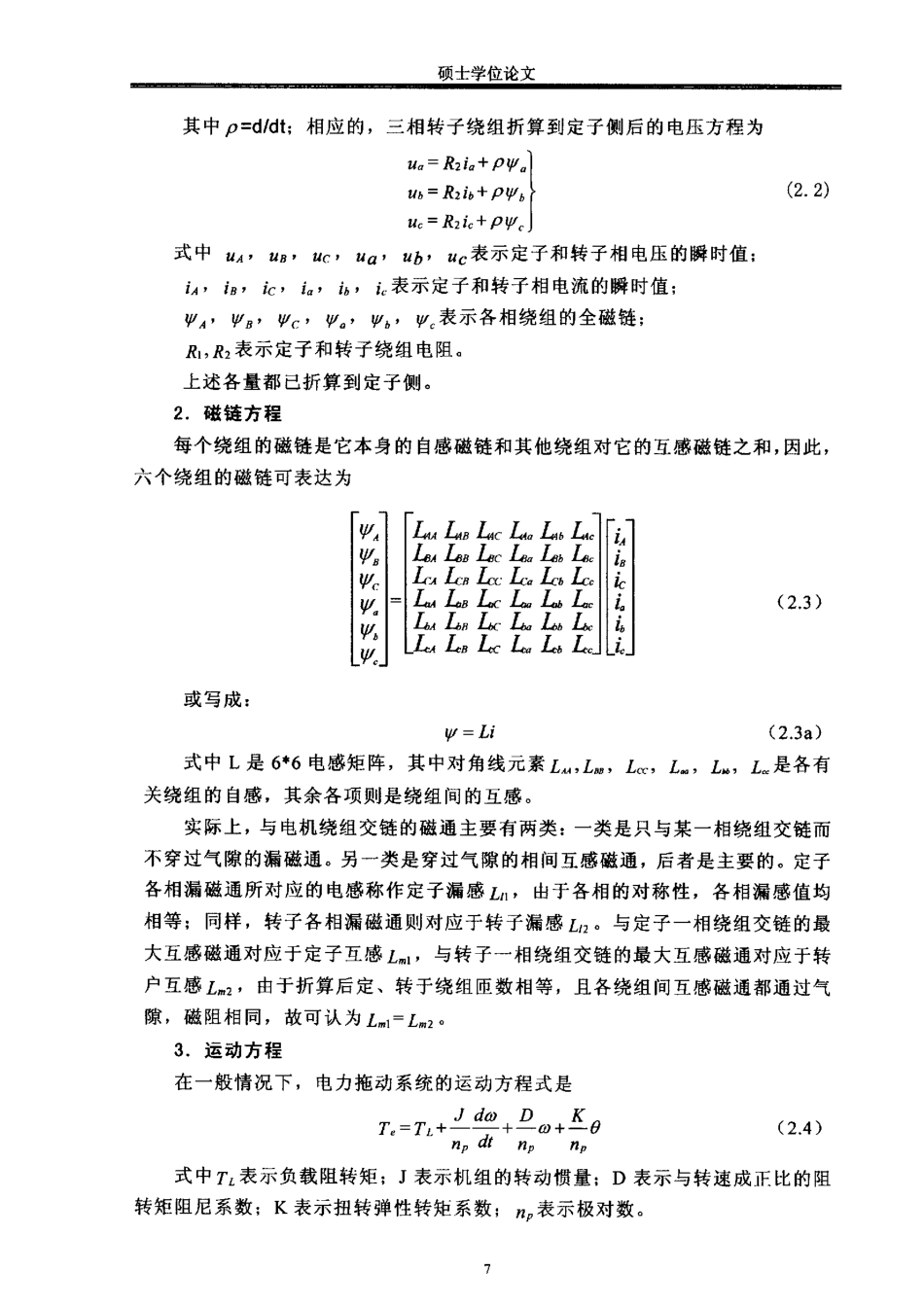
磁链方程每个绕组的磁链是它本身的自感磁链和其他绕组对它的互感磁链之和,因此,六个绕组的磁链可表达为(2
3)︷﹃网回回囚囚困引引列划几瓜几几几几几瓜几几几几疏肠及及寿寿扬扬岛几岛几瓜瓜隔瓜陌氏哟叽姚试汽叭或写成:俨